EtherCAT Safety Modul
EtherCAT Safety Slave verwenden
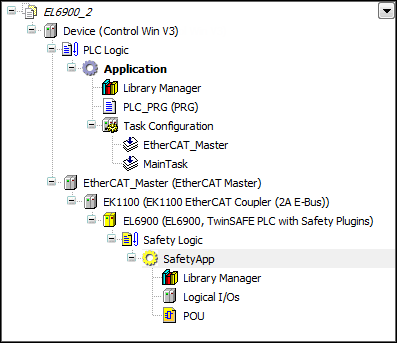
Die EtherCAT Safety Module EL6900 und EL6910 werden unter einem EtherCAT -Buskoppler (z. B. EK1100) eingehängt. Das EtherCAT Safety EK1960 wird unter dem EtherCAT Master eingehängt.
Selektieren Sie dafür den Buskopplers oder den Master und wählen Sie den Kontextmenübefehl Gerät anhängen mit Auswahl des EtherCAT Safety Moduls. Alternativ können Sie den Buskoppler oder Master selektieren und die Steuerung mit Hilfe des Kontextmenübefehl Gerät suchen auswählen und anhängen.
Unter einem EtherCAT Safety Modul wird der logische Knotenpunkt Safety Logik, das Safety-Applikationsobjekt SafetyApp, der Bibliotheksverwalter und der Knotenpunkt Logische E/As automatisch hinzugefügt.
Sie können das EtherCAT Safety Modul mit dem Kontextmenü-Befehl Gerät aktualisieren auf eine neuere Version der Gerätebeschreibung aktualisieren. Dabei werden eventuell Bibliotheken durch neuere Versionen ersetzt.
Der Konfigurationseditor des EtherCAT Safety Moduls umfasst die Registerkarten Allgemein, Parameter, Safety Parameter, E/A-Abbild, Online, CoE-Online, Status und Information. In Abhängigkeit vom Inhalt der ESI-Datei wird außerdem die Registerkarte Diagnosehistorie angezeigt.
Das Registerkarte Allgemein zeigt die Grundeinstellungen für den Slave an, wie sie in der Gerätebeschreibungsdatei definiert sind. Eine detaillierte Beschreibung dieser Parameter sowie der anderen Registerkarten finden Sie in der allgemeinen Beschreibung eines EtherCAT Slaves.
Die Registerkarte Registerkarte: Safety Parameter enthält die für diesen Slave spezifischen Einstellungen sowie Befehle zur Datenübertragung.
Safety Modul als EtherCAT Slave verwenden
Das EtherCAT Safety Modul ist ein EtherCAT Slave. Daher werden für das Modul auch Diagnoseinformationen aus dem CODESYS Feldbus-Support angezeigt, die bei Problemen interessant sein könnten.
Für weitere Informationen siehe
Verwenden von AX8xxx-Antrieben
Der AX8xxx-Antrieb ist ein EtherCAT Slave mit integrierten Antriebssicherheitsfunktionen (SOS, SLS, etc.)
Der Antrieb kann nach dem Import der ESI-Datei mit einem TwinCAT-Modul für STO verbunden werden. Er kann jedoch nicht mit dem Add-on CODESYS Safety for EtherCAT Safety Module programmiert werden. Daher stehen die speziellen Sicherheitsfunktionen des AX8xxx nicht zur Verfügung (es sei denn, der Antrieb wird mit TwinCAT für zusätzliche Funktionen programmiert).
Im Gerätebaum wird die Klemme als ein EtherCAT Modul (EtherCAT Safety SC Modul) mit den EtherCAT -Einstellungen und Standard-E/A-Kanälen und als ein Submodul für die TSC-Verbindung in die Sicherheitssteuerung dargestellt.
Tipp
Die vollständige Beschreibung der Klemmen mit technischen Daten und Angaben zu Standard-E/A-Kanälen und -Konfiguration entnehmen Sie bitte der entsprechenden Gerätedokumentation. Anwendungsbeispiele für TwinSAFE-SC Klemmen finden Sie im TwinSAFE Applikationshandbuch von Beckhoff.
Safety-Parameter konfigurieren
Safety spezifische Parameter des EtherCAT Safety Moduls
Für weitere Informationen siehe: Registerkarte: Safety Parameter