SF_MutingPar_2Sensor
Tipp
Die Version des hier beschriebenen Bausteins entspricht der neuesten Version des Bausteins in der Versionsliste der Bausteine
Anwendbare Sicherheits-Standards
SF_MutingPar_2Sensor ist ein zertifizierter PLCopen-Baustein. Detaillierte Informationen zu angewendeten Normen findet der Anwender bei PLCopen - Technical Committee 5 - Safety Software
Wichtig
Die in den Normen aufgeführten Anforderungen müssen vom Anwender erfüllt werden.
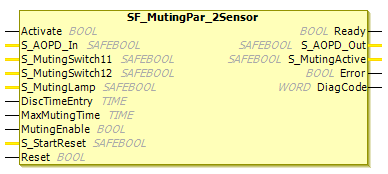
Interface-Beschreibung
Muting ist das beabsichtigte Unterdrücken einer Sicherheitsfunktion. In diesem Baustein ist das parallele Muting mit zwei Mutingsensoren spezifiziert.
Name | Datentyp | Initialwert | Beschreibung, Parameterwerte |
|---|---|---|---|
|
|
| |
|
|
| Variable
|
|
|
| Variable Status des Mutingsensors
|
|
|
| Variable. Status des Mutingsensors
|
|
|
| Variable oder Konstante. Zeigt Zustand der Muting-Lampe.
|
|
|
| Konstante 0..4 s; Maximale Diskrepanzzeit für Der Vorsichtshinweis ‚DiscTimeEntry und MaxMutingTime‘ ist zu beachten! |
|
|
| Konstante Maximale Zeit für komplette Muting-Sequenz, Timer wird gestartet, wenn der erste Mutingsensor bedämpft wird. Der Vorsichtshinweis ‚DiscTimeEntry und MaxMutingTime‘ ist zu beachten! |
|
|
| Variable oder Konstante. Befehl des Steuerungssystems, der den Start der Muting-Funktion aktiviert, wenn vom Maschinenzyklus benötigt. Nach Start der Mutingfunktion kann dieses Signal abgeschalten werden.
|
|
|
| |
|
|
|
DiscTimeEntry und MaxMutingTime
Für Entwickler im Extended Level gilt: die Eingänge DiscTimeEntry und MaxMutingTime müssen mit konstanten Werten beschaltet werden. D. h. diese Werte dürfen bei den Aufrufen nicht verändert werden!
Name | Datentyp | Initialwert | Beschreibung, Parameterwerte |
|---|---|---|---|
|
|
| |
|
|
| Sicherheitsgerichteter Ausgang, zeigt den Zustand der nicht trennenden Schutzeinrichtung der Muting-Anwendung an.
|
|
|
| Zeigt den Status des Muting-Prozesses an.
|
|
|
| |
|
|
|
Wichtig
Leitungskontrolle der Muting-Sensorsignale muss in der Sicherheitsschleife aktiv sein.
Funktionale Beschreibung
Muting ist die beabsichtigte Unterdrückung einer Sicherheitsfunktion. Dies ist erforderlich, wenn zum Beispiel Material in den Gefahrenbereich transportiert werden soll, ohne einen Stop der Maschine zu verursachen. Muting wird durch einen Mutingsensor getriggert. Die Verwendung von zwei Mutingsensoren und die korrekte Integrierung in den Fertigungsablauf muss sicherstellen, dass keine Person in den Gefahrenbereich gelangt, während das Lichtgitter gemutet ist. Mutingsensorgen können Drucktaster, Näherungsschalter, photoelektronische Barrieren, Grenztaster, etc. sein, die nicht ausfallsicher sein müssen. Aktiver Muting-Modus muss durch Anzeigelampen indiziert werden.
Es gibt sequentielle und parallele Mutingverfahren. In diesem Baustein wurde paralleles Muting mit 2 Mutingsensoren verwendet. Ein Beispiel ist unten aufgeführt. Die Positionierung der Sensoren sollte entsprechend IEC Normen erfolgen. Der Baustein kann in beide Richtungen, vorwärts und rückwärts, verwendet werden. Dabei kann die aktuelle Richtung nicht ermittelt werden. Das Muting sollte mit dem MutingEnable-Signal der Prozesssteuerung aktiviert werden, um Manipulation zu vermeiden.
Die Eingangsparameter des Bausteins beinhalten die Signale der 2 Mutingsensoren (S_MutingSwitch11 und S_MutingSwitch12), das OSSD-Signal der „aktiven opto-elektronischen Schutzeinrichtung“ S_AOPD, sowie die zwei parametrierbaren Zeiten DiscTimeEntry und MaxMutingTime.
Achtung
Der S_StartReset-Eingang soll nur aktiviert werden, wenn sichergestellt ist, dass keine Gefährdungssituation entstehen kann, wenn die S-SPS startet.
Nr. | Bild | Erklärung |
|---|---|---|
1 | 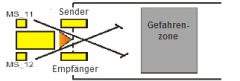 | Wenn Reflexionslichtschranken als Mutingsensoren verwendet werden, so werden diese generell diagonal angeordnet. Generell erfordert diese Anordnung von Reflexionslichtschranken als Mutingsensoren nur zwei nur zwei Lichtschranken und nur |
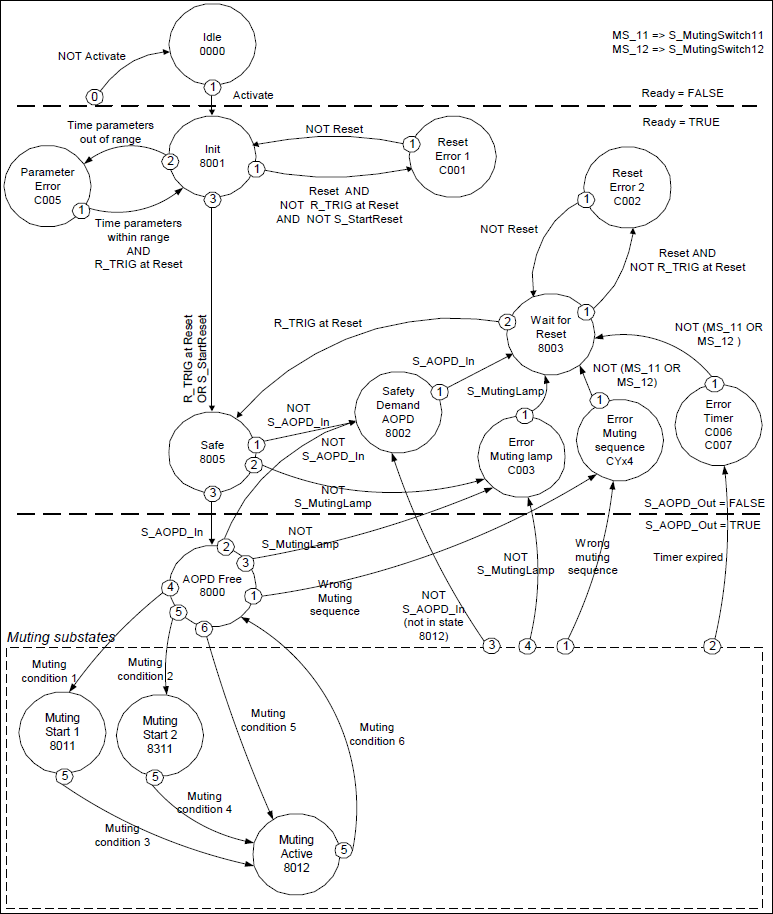
Statusdiagramm
Tipp
Anmerkung: Der Übergang von jedem Zustand zum Zustand Idle, bedingt durch Activate = FALSE, wird nicht gezeigt. In jedem Fall haben diese Übergänge die höchste Priorität.
Typisches Zeitdiagramm
SF_MutingPar_2Sensor (S_StartReset = TRUE, Reset = FALSE, S_MutingLamp = TRUE)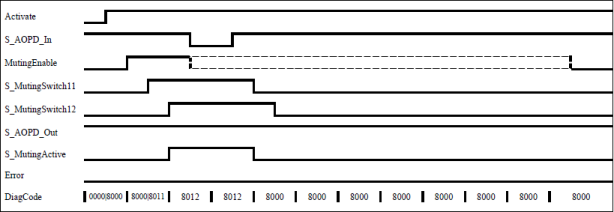
Muting-Bedingung 1 (zu
16#8011)(MS_11ist der erste bedämpfte Eingangssensor) Start TimerDiscTimeEntryundMaxMutingTime:MutingEnable AND R_TRIG at MS_11 AND NOT MS_12Muting-Bedingung 2 (zu
16#8311)(MS_12 ist der erste bedämpfte Eingangssensor): Start TimerDiscTimeEntryundMaxMutingTime:MutingEnable AND NOT MS_11 AND R_TRIG at MS_12Muting-Bedingung 3 (von
16#8011zu16#8012)(MS_12ist der zweite bedämpfte Eingangssensor): Stopp TimerDiscimeEntry:MutingEnable AND MS_11 AND R_TRIG at MS_12Muting-Bedingung 4 (von
16#8311zu16#8012)(MS_11ist der zweite bedämpfte Eingangssensor): Stopp TimerDiscTimeEntry:MutingEnable AND R_TRIG at MS_11 AND MS_12Muting-Bedingung 5 (von
16#8000zu16#8012) (beide Sensoren bedämpft im gleichen Zyklus): Start TimerMaxMutingTime:MutingEnable AND R_TRIG at MS_11 AND R_TRIG at MS_12Muting-Bedingung 6 (von
16#8012zu16#8000)(beide Sensoren gelöst im gleichen Zyklus oderMS_11undMS_12nacheinander gelöst). Stopp TimerMaxMutingTime:NOT MS_11 OR NOT MS_12
State
16#8000:(R_TRIG at MS_11 AND MS_12 AND NOT R_TRIG at MS_12) OR(R_TRIG at MS_12 AND MS_11 AND NOT R_TRIG at MS_11) OR((MS_11 AND NOT R_TRIG at MS_11) AND (MS_12 AND NOT R_TRIG at MS_12)) OR(NOT MutingEnable AND R_TRIG at MS_11) OR(NOT MutingEnable AND R_TRIG at MS_12)State
16#8011:NOT MutingEnable OR NOT MS_11State
16#8311:NOT MutingEnable OR NOT MS_12State
16#8012: alle möglichen Übergänge erlaubt
Fehlererkennung
Der Baustein entdeckt folgende Fehlerbedingungen:
DiscTimeEntrywurde auf einen Wert kleiner alsT#0soder größer alsT#4sgesetzt.MaxMutingTimewurde auf eine Wert kleiner alsT#0sund größer alsT#10mingesetzt.Die Diskrepanzzeit für das Paar
S_MutingSwitch11/S_MutingSwitch12wurde überschrittenDie Mutingfunktion (
S_MutingActive = TRUE) überschreitet die maximale ZeitMaxMutingTimeDie Mutingsensoren
S_MutingSwitch11undS_MutingSwtich12werden in falscher Reihenfolge bedämpft.Mutingsequenz startet ohne Aktivierung durch MutingEnable
Statische Signale des Mutingsensors
Eine fehlerhafte Mutinglampe wird anzeigt durch
S_MutingLamp = FALSE.Eine statische Reset-Bedingung wird in Status
8001und8003entdeckt.
Fehlerverhalten
Bei einem Fehlerereignis werden die Ausgänge S_AOPD_Out und S_MutingActive auf FALSE gesetzt. Der Ausgang DiagCode zeigt den relevanten Fehlercode an und der Ausgang Error wird auf TRUE gesetzt.
Bausteinspezifische Fehler- und Zustandcodes
| Statusname | Statusbeschreibung und Setzen des Ausgangs |
|---|---|---|
|
| Statische Reset-Bedingung entdeckt nach Bausteinaktivierung in Status
|
|
| Statische Reset-Bedingung entdeckt in Status
|
|
| Fehler entdeckt bei Mutinglampe
|
|
| Fehler in der Mutingsequenz in Status
|
|
|
|
|
| Timing-Fehler: Aktive Mutingzeit (wenn
|
|
| Timing-Fehler: Diskrepanzzeit für Schalten von
|
| Statusname | Statusbeschreibung und Setzen des Ausgangs |
|---|---|---|
|
| Der Baustein ist nicht aktiv (Grundzustand)
|
|
| Muting nicht aktiv und keine Sicherheitsanforderung von AOPD. Wenn die Timer des darauffolgenden Mutings noch laufen, werden sie gestoppt.
|
|
| Baustein wurde aktiviert
|
|
| Sicherheitsanforderung wurde von
|
|
| Safetyanforderung oder Fehler wurden entdeckt und sind jetzt geklärt. Operator-Bestätigung mit
|
|
| Sicherheitsfunktion aktiviert
|
|
| Mutinsequenz befindet sich nach steigender Triggerflanke von
|
|
| Mutingsequenz befindet sich nach steigender Triggerflanke von
|
|
| Mutinsequenz ist aktiv, entweder:
oder
Monitoring von
|