Beispiel: File over EtherCAT
Produkt: CODESYS EtherCAT
Beschreibung
Dieses Beispiel zeigt das Lesen und Schreiben von SDOs mit CAN over EtherCAT sowie das Herunterladen einer Firmware-Datei mit File over EtherCAT. Es zeigt auch wie Sie Informationen über den Master und die Slaves erhalten, wie beispielsweise die Anzahl der aktiven Slaves oder den Zustand des Slaves. Als Hardware werden zwei analoge Klemmen mit CAN-over-EtherCAT eingesetzt. Die File-over-EtherCAT-Funktionen werden theoretisch, ohne Hardware, implementiert.
Weitere Informationen
Für die Gerätekonfiguration können Sie verschiedene Startup-Parameter einstellen. Für Geräte, die CAN over EtherCAT verwenden, wird für jeden Parameter ein Index und ein Subindex verwendet. Für jeden Parameter können Sie den Wert als Zahl oder als Byte-Array mit maximal vier Bytes lesen oder schreiben.
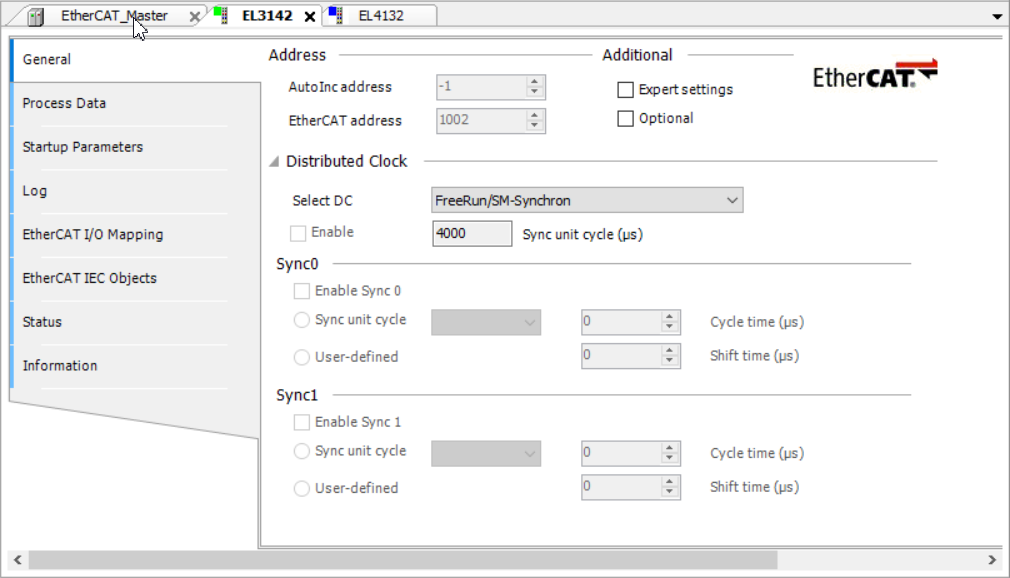 |
Die Parameter für EL4132 und EL3142 werden vor dem Start eingestellt. Durch Doppelklick auf eines dieser Geräte wird die Registerkarte Startparameter angezeigt. Ein Startparameter ist bereits eingestellt und mit der Schaltfläche Neu können Sie weitere Startparameter auswählen. Die Registerkarte Allgemein zeigt die EtherCAT-Adresse an, die später zur Auswahl des Geräts verwendet wird. In der Registerkarte EtherCAT_Master unter der Registerkarte Allgemein müssen Sie die korrekte Quelladresse, an der das Gerät angeschlossen ist, einstellen.
 |
CoE: Zunächst muss das Programm warten, bis der EtherCAT Master bereit ist. Danach wird der bereits eingestellte Parameter vom Gerät 1002 in einem Byte-Array und als DWORD gelesen. Zusätzlich wird ein Parameter von vier Bytes geschrieben und anschließend gelesen. Ein Parameter, der größer als vier Bytes ist, wird auch in diesem Beispiel geschrieben.
Bisher werden nur die Parameterwerte verwendet, aber Sie können auch den kompletten Eintrag in ein Byte-Array lesen. Diese Werte sind gerätespezifisch. Alle Funktionsbausteine enthalten eine Variable udiSdoAbort. Wenn eine Operation abgebrochen wird, gibt diese Variable einen Abbruchcode zurück. Den Fehler zu diesem Code ist zu finden in der CANopen-Spezifikation.
FoE: Diese Funktion demonstriert einen Weg, wie Sie eine fiktive Firmware mit File over EtherCAT herunterladen können. Nachdem der EtherCAT-Master bereit ist, wird der Speicher für die komplette Firmware freigegeben. Dann wird der spezifische Slave in den Boot-Modus gesetzt, um die Firmware herunterzuladen. Wenn der Download beendet ist, wird der Speicher freigegeben.
Die Upload-Funktion hat keinen direkten Bezug zu dem Firmware-Beispiel, sie soll nur zeigen, wie die Instanz aufgerufen wird.
Systemvoraussetzungen und Einschränkungen
Programmiersystem | CODESYS Development System Version 3.5.14.0 oder höher |
Laufzeitsystem | CODESYS Control Win Version 3.5.14.0 |
Zusatzkomponenten | - |
Hinweis
 DOWNLOAD Projekt
DOWNLOAD Projekt