Beispiel: Servodrive over EtherCAT
Produkt: CODESYS EtherCAT
Beschreibung
Dieses Beispiel zeigt, wie Sie mit ServoDrive über EtherCAT IDNs lesen und schreiben können. Als Hardware wird ein Rexroth IndraDrive verwendet. Sie können das Gerät auch gegen ein anderes Gerät austauschen, das ServoDrive über EtherCAT verwendet.
Weitere Informationen
In der Gerätekonfiguration können Sie mehrere Startparameter einstellen. Diese Parameter werden IDNs genannt für Geräte, die ServoDrive über EtherCAT verwenden. Für jede IDN können Sie den Namen, das Attribut, die Einheit, das Minimum, das Maximum und den Wert als Zahl oder Byte-Array mit maximal vier Bytes einstellen.
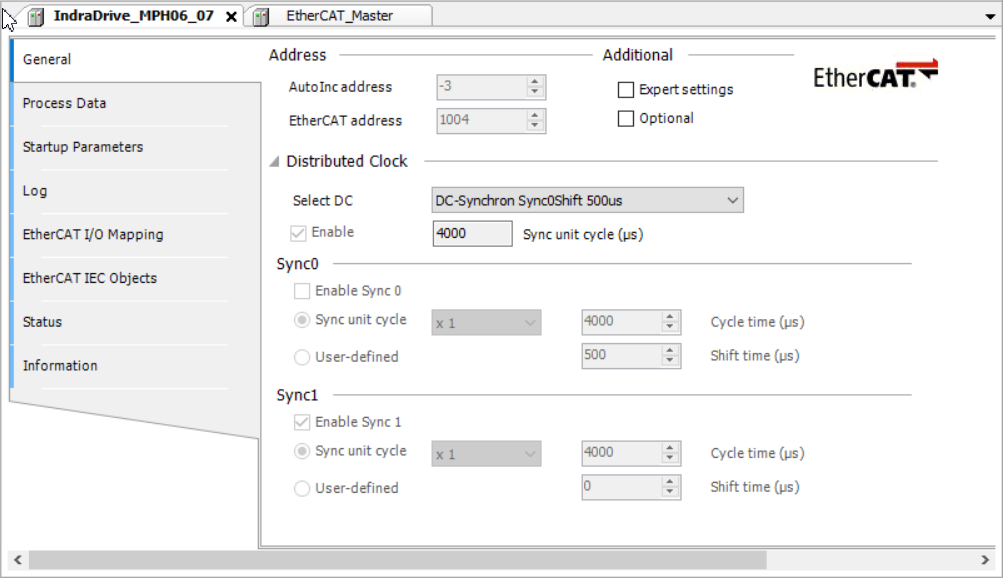 |
Zwei Startparameter sind bereits zu Beginn eingestellt. Schauen Sie sich die Registerkarte Startparameter auf dem Gerät an. Die Registerkarte Allgemein zeigt die EtherCAT-Adresse, über die das Gerät ausgewählt wird. Bei dem Gerät EtherCAT_Master unter der Registerkarte Allgemein müssen Sie die korrekte Quelladresse, an der das Gerät angeschlossen ist, einstellen.
 |
SoE: Zunächst muss das Programm warten, bis der EtherCAT-Master bereit ist. Danach wird die IDN-Nummer 32 aus dem Gerät 1001 gelesen, die bereits beim Start gesetzt wurde. Zusätzlich wird eine IDN in das Gerät geschrieben und anschließend einmal als UINT-Wert und als Byte-Array wieder gelesen.
Sie können den Namen, das Attribut, die Einheit, das Minimum, das Maximum und den Wert einer IDN lesen. Verwenden Sie dazu den spezifischen Wert bei byElem. Der Wert byDrive" wird nicht gesetzt, da das verwendete Gerät nur einen Kanal (=Achse) hat. Der Index des EtherCAT-Masters wird bei usiCom und die Adresse bei uiDevice eingestellt. Abhängig vom Gerät, müssen Sie den Timeout hoch genug einstellen.
Systemvoraussetzungen und Einschränkungen
Programmiersystem | CODESYS Development System Version 3.5.14.0 oder höher |
Laufzeitsystem | CODESYS Control Win Version 3.5.14.0 |
Zusatzkomponenten | - |
Hinweis
 DOWNLOAD Projekt
DOWNLOAD Projekt