Funktionen
CANopen Safety
CANopen Safety ist als europäische Norm (EN 50325-5) veröffentlicht. Damit können Daten über CAN-Netzwerke übertragen werden, die den Anforderungen für SIL3-Anwendungen genügen. Diese sicherheitsgerichtete Datenübertragung kann parallel zu einer bestehenden CANopen-Datenübertragung stattfinden. CODESYS uuCANopen Safety unterstützt die Sicherheitsanforderungen nach SIL2.
Neben den herkömmlichen CANopen-Diensten zur Datenübertragung wie SDO und PDO wird für die Safety-Erweiterung mit dem SRDO-Dienst (Safety Related Data Object) ein spezieller Dienst für diese Datenübertragung definiert. Hinsichtlich der Konfiguration und Art der Kommunikation ähnelt dieser einem PDO, jedoch werden zusätzliche Eigenschaften definiert.
Zur Verwendung von CANopen Safety wird anstatt des CANopen Managers der CANopen Manager SIL2 im Gerätebaum eingehängt. Unter diesen Manager können sowohl sichere Geräte (gelbes Geräte-Icon) als auch unsichere Geräte (graues Geräte-Icon) eingehängt werden. Es können also unsichere und sichere CAN-Teilnehmer parallel betrieben werden. Die sicheren Teilnehmer haben zusätzlich zu den normalen Konfigurationsseiten Safety-spezifische Seiten. In diesen können die SRDOs (sichere PDOs), sowie deren CRCs konfiguriert werden. Neben den normalen unsicheren Geräteinstanzen, wird pro Safety-Gerät (CANopen Manager und Slaves) eine zusätzliche Instanz mit Präfix „S_“ generiert. Diese bietet Safety-spezifische Diagnosemöglichkeiten.
Die Verwendung des CANopen Manager SIL2 setzt ein SIL2 CODESYS Runtime mit einem speziell angepassten CAN-Minitreiber, sowie ein CODESYS SIL2 Plug-in voraus. Die benötigten Bibliotheken und Geräte sind in der Standardinstallation bereits enthalten.
Redundanz
Mit dem CODESYS Redundancy Toolkit können in einer Redundanzkonfiguration zwei CANopen Manager verwendet werden. Dabei überwacht die passive Steuerung die Aktivitäten der aktiven Steuerung und übernimmt bei einem erkannten Kommunikationsausfall die aktive Rolle. Die Überwachung erfolgt über zwei parallele Mechanismen:
Überwachung des CODESYS Redundancy Toolkits (meistens über Ethernet)
Überwachung des CANopen Manager-Heartbeats. Der gewünschte Timeout wird im Konfigurator des CANopen Managers eingestellt.
Tipp
Für die Funktion ‚Redundanz‘ ist das Add-On „CODESYS Redundancy Toolkit“ erforderlich. Weiterhin müssen Sie die Redundanz im Gerätebaum konfigurieren.
Für weitere Informationen siehe: CODESYS Redundancy
Rekonfiguration CANopen Manager
Mit der Funktion „Rekonfiguration“ können Sie eine initial auf die Steuerung heruntergeladene CAN-Bus-Konfiguration zur Laufzeit der Anwendung dynamisch anpassen.
Mit dem Funktionsbaustein DED.Reconfigure, der bei aktivierter generischer Gerätediagnose (SPS-Einstellungen) verfügbar ist, können Sie folgende Aktionen zur Laufzeit ausführen:
Aktivieren/Deaktivieren einzelner Geräte
Aktivieren/Deaktivieren eines kompletten Busstrangs
Tipp
Weiterführende Informationen zur Rekonfiguration auf CANbus-Ebene finden Sie im Kapitel Rekonfiguration CANbus.
Befehl: Geräte suchen
Dialog: Geräte suchen
Gerätename, Gerätetyp, Adresse, Stationsname etc. | Daten zum gefundenen Gerät, abhängig vom Netzwerktyp. Wenn Sie einen Wert in der Liste der gefundenen Geräte ändern, wird der Wert kursiv dargestellt. Das zeigt an, dass der neue Wert im Editor in CODESYS geändert ist, jedoch noch nicht im Gerät. Sobald Sie den Wert ins Gerät geladen haben, wird er wieder normal dargestellt. Werte, die Unterschiede zwischen Projekt und gefundenen Geräte zeigen, erscheinen orange. Wenn mehrere Gerätebeschreibungen für das gefundene Gerät vorhanden sind, so wird der Name in Fettschrift dargestellt. Die Auswahl der passenden Gerätebeschreibung ist für die verschiedenen Feldbusse unterschiedlich gelöst. Details hierzu finden Sie im entsprechenden Feldbuskapitel. Wenn keine Gerätebeschreibung gefunden wurde, so erscheint die Meldung „Attention! The device was not found in the repository“. Abhängig vom Bussystem werden zusätzliche Informationen wie zum Beispiel Herstellernummer und Produktnummer angezeigt. Ohne die installierte Gerätebeschreibung kann das Gerät nicht in das Projekt eingefügt werden. |
Unterschiede zum Projekt anzeigen |
|
Geräte suchen | Startet einen erneuten Suchlauf. |
Ins Projekt kopieren | Das in der Tabelle selektierte Gerät wird in den Gerätebaum im Projekt eingefügt. Wenn nichts selektiert ist, werden alle gefundenen Geräte übernommen. |


Wichtig
Wenn Sie mit Alle Geräte ins Projekt kopieren Geräte in den Gerätebaum einfügen, die im Gerätebaum bereits vorhanden sind, ist Folgendes zu beachten: Die Daten der Registerkarten Prozessdaten und <…> E/A-Abbild der bereits vorhandenen Geräte können mit den Daten der neu eingefügten Geräte überschrieben werden.
Dieser Teil des Dialogs ist nur sichtbar, wenn Sie die Option Unterschiede zum Projekt anzeigen aktiviert haben. Unterschiede zwischen den gefundenen und konfigurierten Geräten werden farblich markiert. Grün dargestellte Geräte sind auf beiden Seiten identisch. Rot dargestellte Geräte sind nur in der Ansicht der gefundenen oder konfigurierten Geräte vorhanden. | |
 | Wenn Sie in beiden Ansichten ein Gerät selektiert haben, wird das gefundene Geräte oberhalb des selektierten konfigurierten Geräts eingefügt. |
 | Wenn Sie in beiden Ansichten ein Gerät selektiert haben, wird das gefundene Geräte unterhalb des selektierten konfigurierten Geräts eingefügt. |
 | Wenn Sie in beiden Ansichten ein Gerät selektiert haben, wird das konfigurierte Geräte durch das gefundene Gerät ersetzt. |
 | Alle gefundenen Geräte werden in das Projekt kopiert. |
 | Löscht das selektierte konfigurierte Gerät. |
Verhalten des Buszyklus beim CANopenManager
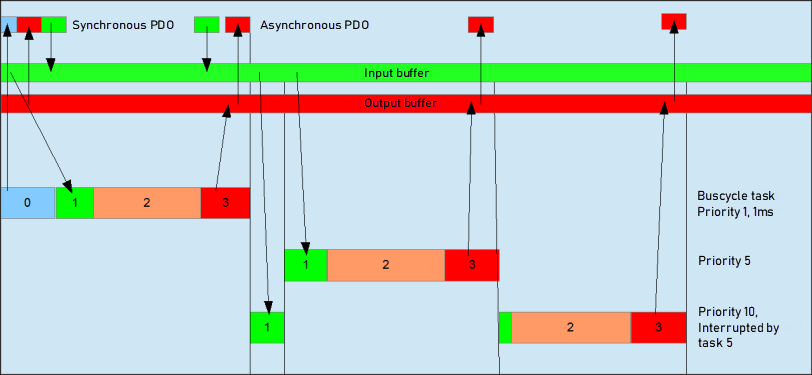
0: Senden/Empfangen von synchronen PDOs
1: Empfangen von asynchronen PDOs
2: IEC-Task
3: Schreiben der Ausgänge in den Ausgangspuffer
Für weitere Informationen siehe: Taskkonfiguration