五轴变换
通过 5 轴变换,您可以控制由三个线性空间轴(X、Y、Z)和一个刀头组成的运动学。工具头由两个固定工具的轴组成。一个刀具轴围绕 Z 轴旋转,刀具根据以下方案倾斜其他轴。
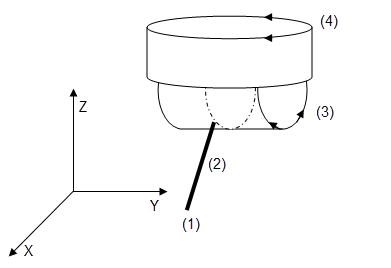
参数:长度 dTool = 从加工点(刀尖 = TCP)到回转轴倾角的距离。
. 通过五个位置值控制 5 轴变换:
处理点 (TCP) 的 X/Y/Z 位置包含在
pi.dX, pi.dY, pi.dZ.单位:轴的位置单位。通过包含在
pi.dB和pi.dC.单位:角度。
. 零位
处理点 (TCP) 位于 (
0/0/-dTool)。刀具沿负 Z 轴方向延伸。旋转轴倾角的定位方式是,沿正方向旋转会使刀具沿 X 轴正方向移动。
例 13. 例子
对于运动 N30,首先指向 X 方向的倾斜轴旋转,并在运动结束时保持在负 X 方向上倾斜。
N0 PB360 PC360 (set axis B and C in modulo mode 360) N10 F10 FB100 FC100 (velocity in X/Y/Z: 10, in B and C 100) N20 G0 X0 Y0 Z0 C0 B30 (start position) N30 G1 X20 B-30 (target position)
有关更多信息,请参阅: SMC_TRAFO_5轴(FB) 和 SMC_TRAFOF_5 轴 (FB)