轴心国
下图显示了轴组的可能状态以及状态之间的转换。
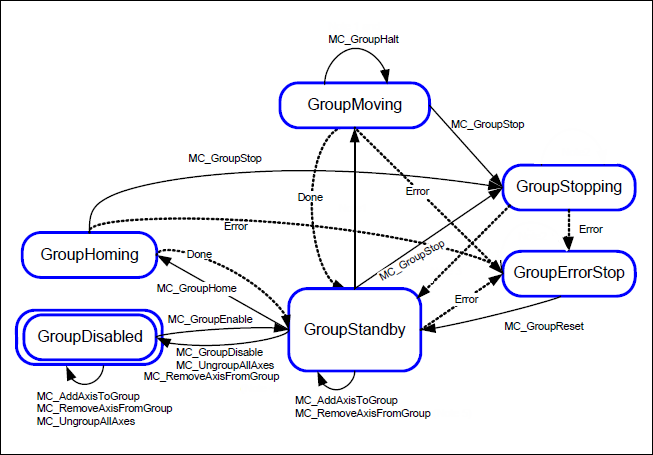
单个轴的错误总是指向轴组
GroupErrorStop状态。如果轴组切换至
GroupMoving,则所有轴都切换为SynchronizedMotion。如果轴组从
GroupMoving到GroupStandby,则所有轴都切换为standstill。如果轴组从
GroupMoving到GroupErrorStop,则所有轴都切换为GroupErrorStop。如果轴组在
GroupStandby,那么各个轴不一定都在standstill因为它们可以通过单轴运动功能块来控制,例如MC_Jog.如果运动因错误而终止,则所有缓冲的后续运动都将中止,
CommandAborted。只要轴组遵循动态坐标系,它就会停留在
GroupMoving。轴组在
GroupMoving当且仅当该组以协调的方式移动(通过第 4 部分中的一个运动块)。切换自GroupMoving到GroupStandby在最后一次位置更改后一个周期完成。