动作的中断和继续
这 Robotics_Interrupt_Continue.project 此处描述的示例项目位于 CODESYS 在下面 ..\CODESYS SoftMotion\Examples。
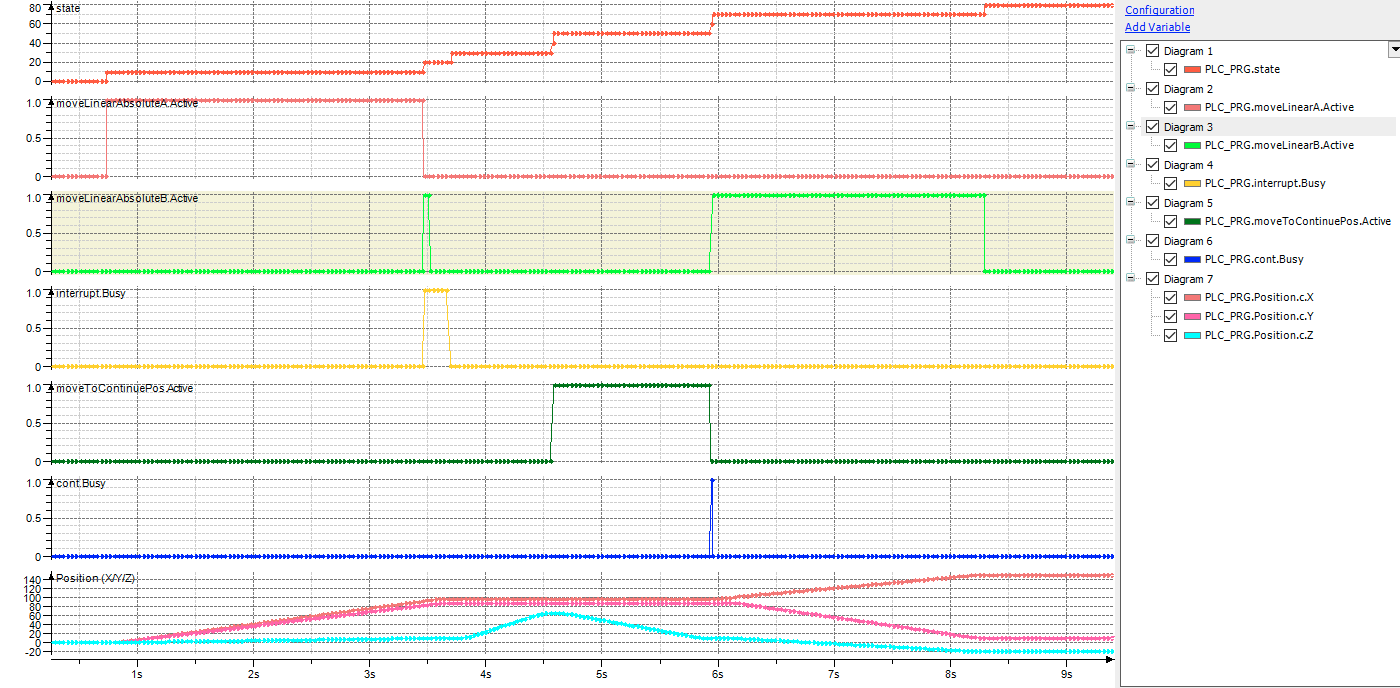
此示例显示了如何使用 SMC_GroupInterrupt 功能块,并在稍后的时间恢复 SMC_GroupContinue 功能块。轴组可以执行中断和继续之间的任意运动。
应用程序的结构
该应用程序由一个简单的状态机组成 PLC_PRG 程序和跟踪以便轻松追踪状态转换。
首先,启用轴和轴组。(
STATE_POWER_ON)然后,两个动作,
moveLinearA和moveLinearB,需要混合。(STATE_START_MOVING)一旦第二个运动开始(混合开始时),运动就会中断。原因可能是检测到工具缺陷。
(STATE_INTERRUPT)例如,在正 Z 方向执行相对 PTP 运动,以更换缺陷后的工具。
(STATE_INTERMEDIATE_MOVEMENT)恢复前,系统返回到原来运动中断的位置。(
STATE_GET_CONTINUE_POS/STATE_MOVE_TO_CONTINUE_POS)恢复原来的动作。
(STATE_CONTINUE)
用法
编译创建的程序并登录。要跟踪不同的状态,您可以将跟踪下载到控制器。启动应用程序。