运动学包括 CODESYS SoftMotion
表 62. 龙门系统
姓名 | 表示 | 可与定向运动学相联系 | 附加信息 |
|---|---|---|---|
Gantry2 | ✓ | ||
Gantry3 | ✓ | ||
HGantry2 | 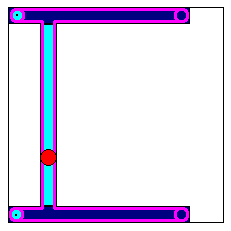 | ✓ | |
HGantry3 | 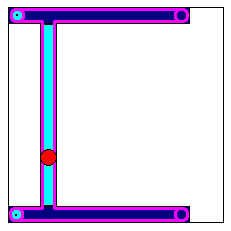 | ✓ | |
TGantry2 |  | ✓ | |
5轴龙门 | -- |
表 63. SCARA 系统
姓名 | 表示 | 可与定向运动学相联系 | 附加信息 |
|---|---|---|---|
极性 |  | ✓ | |
带 Z 轴的极坐标 | 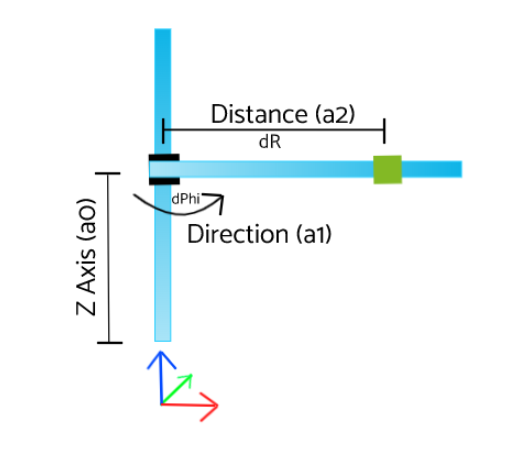 | ✓ | |
带 Z 轴的 Scara2 | 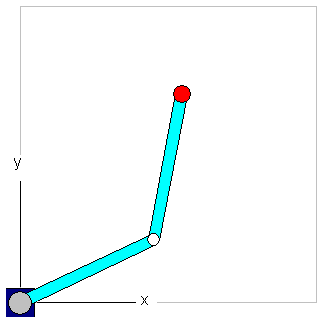 | ✓ | |
带 Z 轴的 Scara3 | 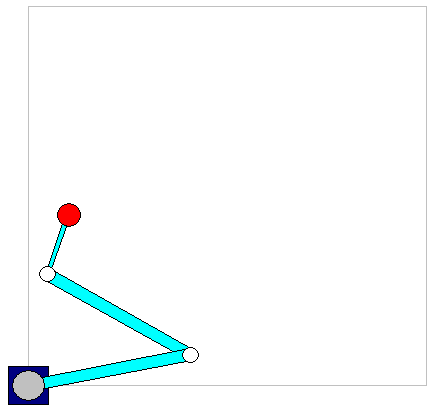 | -- |
表 64. 关节型机器人
姓名 | 表示 | 可与定向运动学相联系 | 附加信息 |
|---|---|---|---|
带 3 个旋转轴的关节机器人 | 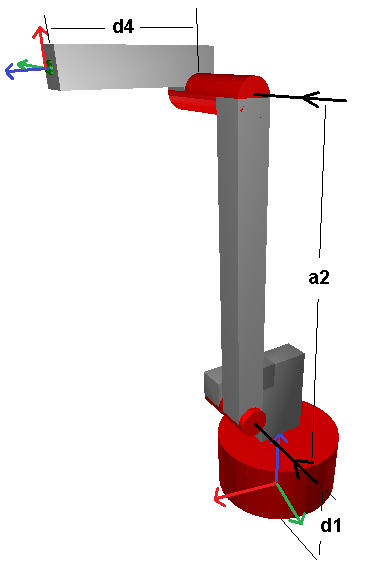 | ✓ | |
4轴码垛机 | 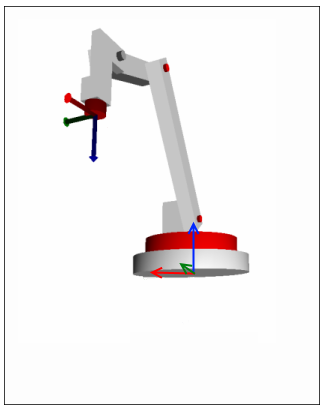 | -- | |
6轴关节机器人 | 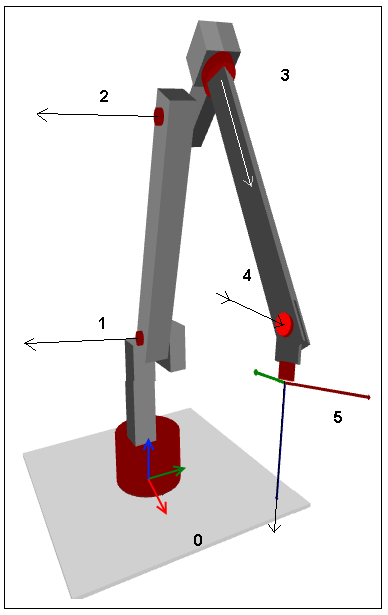 | -- |
表 65. 并行系统
姓名 | 表示 | 可与定向运动学相联系 | 附加信息 |
|---|---|---|---|
带旋转轴的两脚架 | ✓ | ||
带旋转轴的三脚架 | 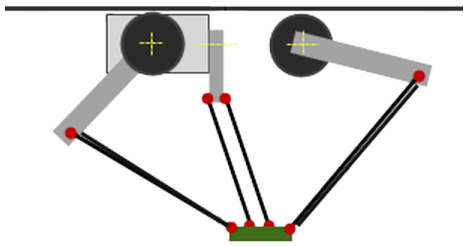 | ✓ | |
带线性轴的三脚架 | 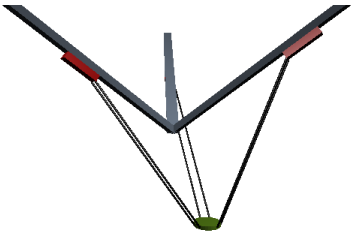 | ✓ |
表 66. 方向运动学
姓名 | 表示 | 附加信息 |
|---|---|---|
C 轴 | ||
带刀具的 C 轴 | ||
工具 | ||
Wrist2 |  | |
Wrist3 |