在机器人中使用其他轴
这个 Robotics_AdditionalAxes.project 示例项目显示了如何在机器人技术中配置和使用其他轴。其他轴是与机器人的协调运动同步移动的
该项目位于的安装目录中 CODESYS 下面 ..\CODESYS SoftMotion\Examples。
应用程序的结构
轴组配置在 AxisGroup 对象。使用了具有 3 个轴(两个旋转轴和一个线性 Z 轴)的 SCARA 机器人
下面还添加了另外两个轴 附加轴 并链接到两个轴 DriveAdd1 和 DriveAdd2。
这个 PLC_PRG 程序包含一个用于程序流的简单状态机。首先,轴组处于启用状态 0,然后是 PTP 向位置移动 (X=50, Y=50) 已执行。然后将其混合成直线运动 (X=50, Y=-50)。
对于第一次机器人运动,轴的移动会随着距离的增加而相对增加 (10, 20) 被指挥。对于第二次机器人运动,附加轴的距离为 (-10, -20)。
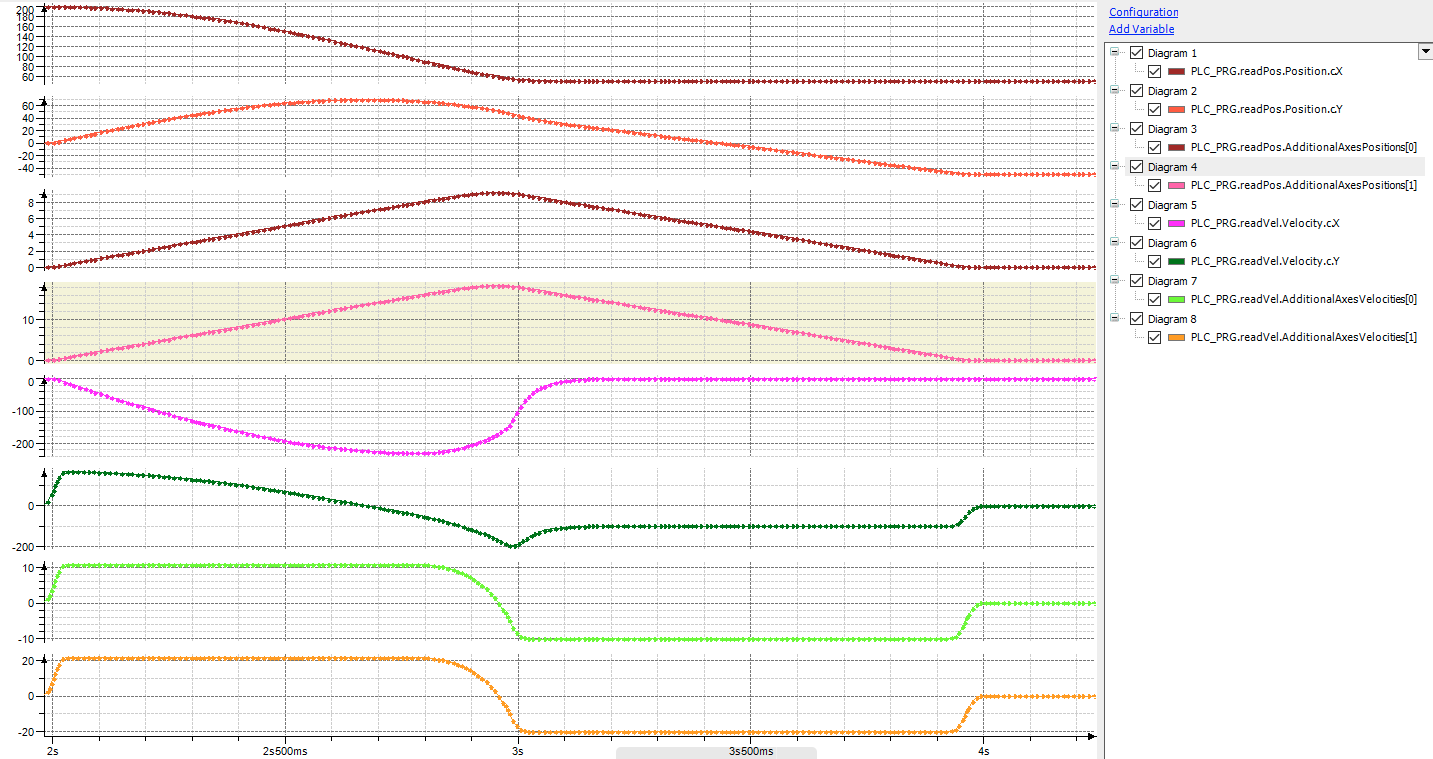
这个 MC_GroupReadActualPosition 和 MC_GroupReadActualVelocity 功能块用于读取运动学和其他轴的位置和速度。
调试
生成应用程序并将其下载到控制器。
打开跟踪记录并将其下载到控制器。
启动应用程序。
您可以跟踪 X 和 Y 坐标以及轨迹中另外两个轴的移动。