的定义 SoftMotion 凸轮
凸轮描述了一个驱动器(从站)对另一个驱动器(主站)的功能依赖性。该关系由将定义的主值范围映射到从值的连续函数(或曲线)描述。更准确地说:在将主轴分成合适的段后,这些函数的图形可以在每个区间上用一条线或一个 5 次多项式表示。
例 5. 例子
在凸轮图中,主值应用于水平轴,从属值应用于垂直轴。
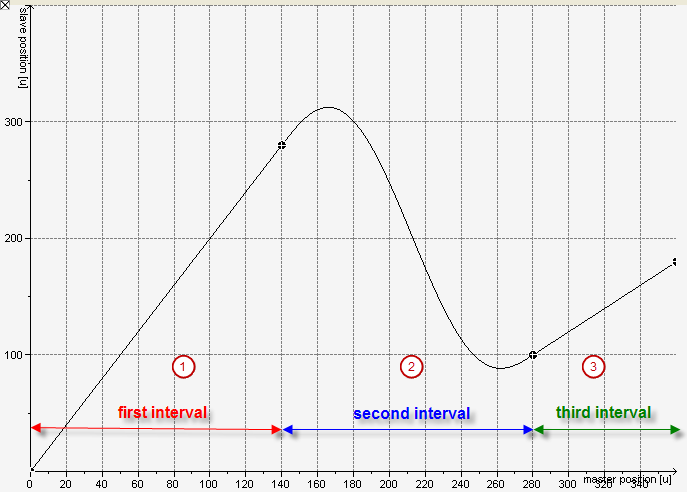
在示例中,主值介于 0 和 360 之间。此范围分为三个区间:
(1) 第一个区间:[0, 140]
(2) 第二个区间:[140, 280]
(3) 第三个区间:[280, 360]
函数(图形)在第一个和第三个区间是线性的,它的图形显示为一条线。结果,它的一阶导数(斜率)是常数,所有高阶导数都是 0。
在第二个区间中,图形由 5 次多项式描述。因此,它的一阶导数是一个 4 次多项式,它的二阶导数(曲率)是一个 3 次多项式,它的三阶导数是一个 2 次多项式,等等。
当函数根据主站的位置描述从站的运动时,它的一阶导数对应于从站的速度,二阶导数对应于它的加速度。
当您牢记这种物理解释时,很明显映射必须是连续的。这意味着它的图形不允许有任何跳跃。特别是,连续性也必须在两个间隔相交的每个点处实现。此外,一阶和二阶导数通常也需要连续性。 (实际上,区间起点和终点的这三个连续性条件决定了插入两条直线段之间的 5 次多项式的系数。
此外,您可以在凸轮的任何位置添加挺杆(二进制开关)。这样,您可以创建仅包含挺杆的凸轮表。然后从位置在整个主值范围内设置为零。