GearInPos(飞锯)
查看 BasicMotion_GearInPos.project 安装目录中的示例 CODESYS 在下面 ..\CODESYS SoftMotion\Examples。
此示例说明如何使用 MC_GearInPos 实现飞锯。对于这个项目,我们建议安装 CODESYS Depictor,可以将应用程序显示为 3D 动画。(未经许可的免费版本足以做到这一点。)
应用程序的结构
该应用程序由一个状态机组成 PLC_PRG 程序,3D 表示(场景, DepictorCalculation 程序)、简单的工件模拟(SimulateWorkpiece 您可以通过它轻松了解功能块的效果。
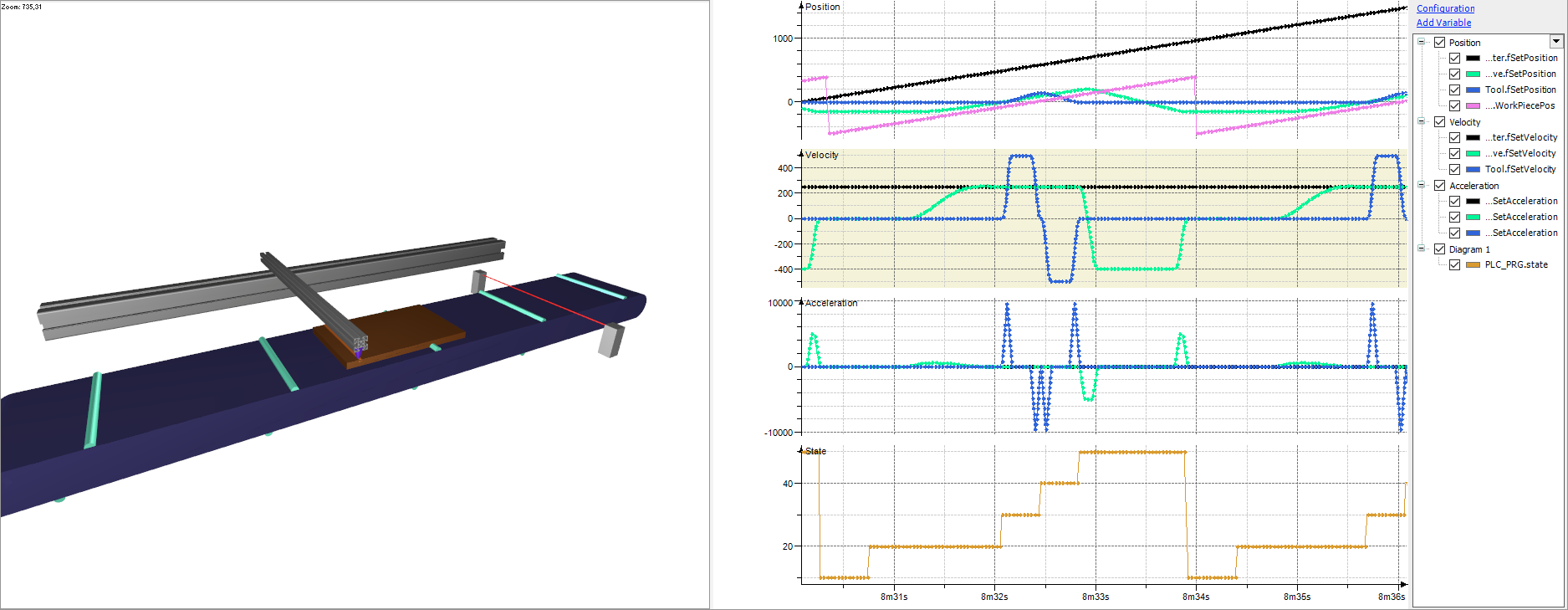
PLC_PRG中的流程如下:
使用
MC_Power。 (STATE_POWER)等待光栅检测到工件。(
STATE_WAIT_FOR_WORKPIECE)一旦光栅检测到工件,将锯子平行于传送带传送的从动装置就会与传送带上的工件同步(由
Master轴)。 (STATE_WAIT_FOR_SYNC)当达到同步时,锯子垂直于工件向前和向后移动一次。(
STATE_MOVE_TOOL_0/1)将从动装置移至静止位置并从 2 处重新开始该过程。(
STATE_MOVE_TO_REST)
坐标系统和尺寸
坐标系原点在传送带中心,Z轴指向上方,X轴指向传送带运动方向,从传送带看,Y轴指向远离锯子的方向。
传送带和工件的尺寸、光栅的位置以及锯与工件同步运行的位置都作为常量存储在 GVL Const。
用法
启动应用程序。在 场景 描绘器对象,在轨迹中,您可以看到主设备(传送带上的工件)和从设备(锯子)之间的同步是如何执行的。