配置和调试
CODESYS SoftMotion Light 配置在 CODESYS
将驱动设备添加到设备树中,例如您自己的 EtherCAT 从站或 CAN 从站设备。
在其下方,插入一个 CODESYS SoftMotion Light 轴。然后点击 .
在编辑器中打开添加的 EtherCAT 或 CAN 设备 (加速网 示例中的模块)。
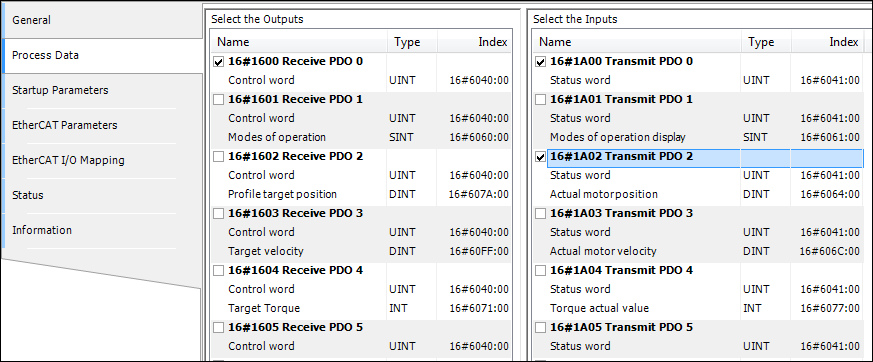
配置 EtherCAT 设备或 CAN 设备的过程数据 (PDO)。
您应该组态过程数据,以便在发生更改时传送“状态字”和可选的“控制字”。如果控制字不是通过 PDO 传输的,那么一旦它发生变化,它就会通过 SDO 传输。对于模块化轴,您必须在使用时传输当前位置
MC_MoveAbsolute_SML或者MC_MoveRelative_SML.您可以同步或在发生变化时传输当前位置。如果位置发生变化时传输,那么你应该配置一个合适的 抑制时间 以防止传播过于频繁。无需通过 PDO 传输其他对象。EtherCAT 设备编辑器中的 PDO 配置示例:
切换到 EtherCAT I/O 映射 标签。在 更新变量, 选择 激活 2(始终在总线循环任务中) 选项。
切换到 一般的 标签。
对于 EtherCAT 驱动器,无需使用分布式时钟。但是,某些驱动器可能需要它们。
提示
对于 CAN 驱动器,您应该激活心跳。或者,如果当前位置被传输,您可以激活 SYNC 报文。在这种情况下,不需要心跳。第三种选择是使用节点保护。对应的配置是在 一般的 CANopen 从站的选项卡。
重要
如果 SYNC 报文、心跳和节点保护均未激活,则 无法确定驱动器是否处于“运行”状态。
打开 CODESYS SoftMotion Light 编辑器中的轴(SML_Drive_GenericDSP402 在示例中)。
配置类似于 CODESYS SoftMotion Light 轴(参见 SoftMotion 设备编辑器的说明)。
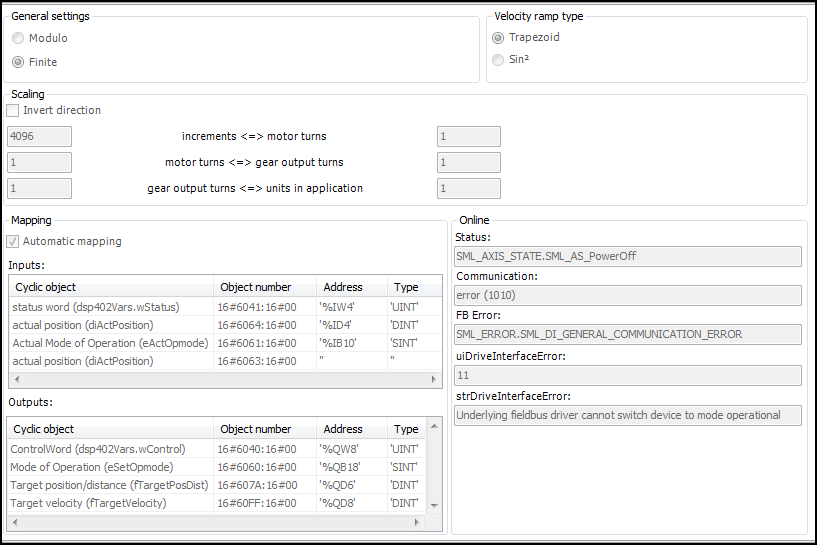
设置以下参数 SoftMotionLight 标签:
常规设置
模数: 模值 [u] (模周期)开。
有限
速度斜坡类型: 确定速度曲线。
梯形:导致梯形速度分布(每段加速度恒定)
辛²:如果驱动器支持,此设置会导致 sin² 函数描述的速度曲线(具有恒定的加速度曲线)。
缩放:将增量设置为应用程序中的单位。
在这里,您定义转换整数位置值的因子 (增量) 转化为技术单位 (申请单位)。位置值由驱动器接收并发送到设备。技术单位由 IEC 程序使用。通过设置其他参数(电机旋转, 齿轮输入旋转, 齿轮输出转数),您还可以包括一个齿轮箱。
反转方向:使电机接收带有反转符号的预定义值,因此以相反的方向旋转。
切换到 EtherCAT I/O 映射 EtherCAT 从站的选项卡。检查自动生成的映射 CODESYS SoftMotion Light 进程内存中的地址参数。在某些特殊情况下,可以手动调整此映射。
如果 自动映射 启用,然后自动映射 EtherCAT 从站的输入和输出。
调试
在联机模式下,有关状态、通信和错误的信息显示在 SoftMotionLight 驱动器的选项卡。
为了支持调试,您可以使用 SML_StartupDrive 功能块(SML_Basic.library) 和 VISU_SML_StartupDrive 可视化模板(插入可视化的框架元素)。通过这种方式,您可以轻松访问大部分 CODESYS SoftMotion Light 函数,例如 Power, Home, MoveAbsolute, MoveRelative, 和 MoveVelocity,以及读写参数。