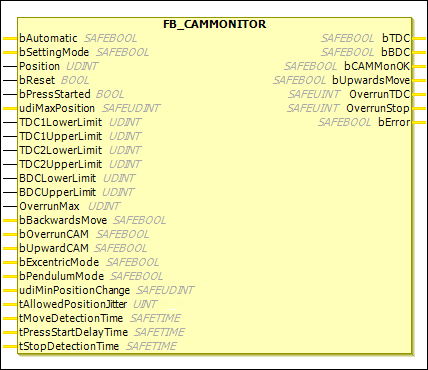
FB_CAMMONITOR
描述 功能块
这 FB_CAMMONITOR 使用功能块实现电子凸轮组,除偏心轮模式外,还支持摆轮模式。
偏心模式:
偏心模式下仅允许一个旋转方向。
进行检查以确保位置最迟在到达上反转点 (TDC:) 后一个循环后停止。 上止点)加上最大超支(
OverrunMax)。OverrunTDC输出当前超限或TDC后的当前位置。下反转点(BDC: 下止点) 指定了下限和上限。超过下止点后,压力机向上运动。此信息在
bUpwardsMove输出。如果压力机在没有再次达到或超过 TDC 的情况下停止,或者旋转方向反转,则
bCamMonOK输出立即设置为FALSE。达到静止状态后,仅在检测到下降沿后才允许开始新的循环
bReset输入。这
bBackwardsMove输入用于通知功能块允许压机向后移动。仅当位置介于TDC1UpperLimit和BDCLowerLimit。向后运动结束于TDC1UpperLimit到达了。在偏心模式下,向上的凸轮可以连接到
bUpwardCAM输入和超程凸轮可以连接到bOverrunCAM输入。如果bUpwardCAM输入有效时,将执行检查以验证上行凸轮是否在 BDC 后设置并在 0° 处再次复位。如果bOverrunCAM输入处于活动状态,则进行检查以确保超程凸轮在TDC1LowerLimit并在压机静止时保持设置。只有在下一个循环开始后才可以重置超程凸轮。只有在以下情况下才允许压机向后移动bUpwardCAM和bOverrunCAM输入是FALSE。向后运动结束于bOverrunCAM输入变成TRUE。摆动模式:
摆动模式下允许两个旋转方向。两个上部反转点 (TDC: 上止点) 在此处指定。
因为压力机的驱动曲线可以或者必须针对每种产品进行修改,所以摆锤行程的最大范围是为两个 TDC 的极限设置的。
进行检查以确保
TDC1和TDC2永远不会超过。如果这种情况发生,那么bCamMonOK输出设置为FALSE. 在周期开始时(下降沿在bReset输入),压力机可以以任何运动(脉动、反向等)开始,直到达到下止点。此后,只允许向上运动。向上运动作为信号输出在bUpwardsMove输出。下反转点(BDC: 下止点) 指定了下限和上限。
通过
bReset输入。如果压机向下移动,且在输入端没有检测到下降沿,bReset输入,然后通过设置立即停止bCamMonOK输出至FALSE。可选
bUpwardCAM和bOverrunCAM摆动模式下不支持连接上凸轮和超程凸轮的输入。如果错误地激活它们,则会设置错误。
FB_CAMMONITOR
这 FB_CAMMONITOR 为用户提供安全的评估模块,可以安全地输出凸轮(bTDC, bBDC, 和 bUpwardsMove) 根据设定的固定值并取决于当前位置。
功能块输出: bUpwardsMove
bUpwardsMove 输出为用户提供压机在经过 BDC 后处于向上运动的信息。例如,此信号可用于使光幕静音或将控制命令传输到压机。
压力机位置检测
位置检测必须按照所需的 SIL 或性能等级进行。用户或机器制造商必须证明已满足此条件。
必须可靠地验证位置值,例如从多个模拟值验证,或者必须以另一种安全方式将其提供给功能块。例如,第一种方式可以通过 COMPARE 功能块。此外, bPressStarted 输入可用于生成期望。在这种情况下,移动需求被传达给功能块。然后功能块监控在设置的参数范围内是否也发生了位置变化。
偏心模式/摆锤模式
对于偏心模式, bExcentricMode 输入已设置,并且 TDC2UpperLimit 和 TDC2LowerLimit 输入必须处于非活动状态或为 0。
这 bPendulumMode 输入设置为钟摆模式,并且 TDC2UpperLimit 和 TDC2LowerLimit 输入必须是有效的并且不等于 0。
EL6900
这 FB_CAMMONITOR EL6900 不支持功能块。
姓名 | 数据类型 | 初始值 | 描述,参数值 |
|---|---|---|---|
|
|
|
|
|
|
| 设置模式下的参数传输 如果输入设置为 |
|
|
| 按压位置:必须可靠地验证位置值,例如从多个模拟值验证,或者必须根据所需的 SIL 或性能等级以另一种安全的方式将其提供给功能块。 允许的数据类型: |
|
|
| 复位输入:必须检测到下降沿 |
|
|
| 如果输入有效,则输入端的逻辑 1 预计会发生移动或位置变化。为此, |
|
|
| 压力机 360° 移动过程中允许的最大位置值。 只允许使用常数值(无变量)。 |
|
|
| 偏心模式:上反转点下限(TDC: 上止点)。它位于上反转点的左侧。 摆动模式:压力机左半部分上反转点的下限。该值必须大于下反转点,且小于 允许的数据类型: 允许常量值和变量。 |
|
|
| 偏心模式:上反转点的上限。它位于上反转点的右侧。 摆动模式:压力机左半部分上反转点的上限。该值必须大于 TDC1LowerLimit 且小于 udiMaxPosition。 允许的数据类型: 允许常量值和变量。 |
|
|
| 偏心模式:未使用 摆动模式:压力机右半部分上反转点的下限。该值必须大于 允许的数据类型: 允许常量值和变量。 |
|
|
| 偏心模式:未使用 摆动模式:压力机右半部分上反转点的上限。该值必须大于 0 且小于 允许的数据类型: 允许常量值和变量。 |
|
|
| . 下反转点的下限
允许的数据类型: 允许常量值和变量。 |
|
|
| . 上反转点的上限
允许的数据类型: 允许常量值和变量。 |
|
|
| 偏心模式: 摆动模式:未使用 允许的数据类型: 允许常量值和变量。 |
|
|
| 偏心模式:使用此输入,压机可以向后移动。直到 摆动模式:未使用 |
|
|
| 偏心模式:可选。可在此处连接超程凸轮。进行检查以确保超程凸轮在 TDC 后设置,并在压力机静止时保持设置。超程凸轮只能在下一个循环启动后重置。 摆动模式:未使用 |
|
|
| 偏心模式:可选。可在此处连接向上凸轮。进行检查以确保凸轮设置为 BDC 并重置为 0°。 摆动模式:未使用 |
|
|
|
其中只有一个 只允许使用常量值(无变量) |
|
|
|
其中只有一个 只允许使用常量值(无变量) |
|
|
| 如果 |
|
|
| 静止位置允许的抖动(单位:毫秒) 只允许使用常量值(无变量) |
|
|
| 如果 |
|
|
| 如果 |
|
|
| 静止检测的时间帧(以毫秒为单位),其中位置只能移动值 只允许使用常量值(无变量) |
姓名 | 数据类型 | 初始值 | 描述,参数值 |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
启动功能块所编程的组后, |
|
|
| 偏心操作: 摆动模式:根据运动的哪一半启动,输出设置在另一半。输出设置为 |
|
|
| 偏心操作: 摆动模式:未使用 |
|
|
| 下降沿位置之间的差异 |
|
|
|
|