配置伺服电机
要求:Adafruit 16 通道/12 位 PWM 板通过 I²C 连接,模型伺服连接到其第一个 PWM 通道。
这 SoftMotion Servo Example.project 项目包含一个应用程序,其中 CODESYS SoftMotion 与模型伺服电机配合使用。通过 I²C 连接的扩展板 (Adafruit ID 815) 用作通信接口。
打开
SoftMotion Servo Example.project项目并更新它。在设备树中,双击 设备.
设备编辑器打开。
在 通讯设置, 点击 扫描网络.
如果您的 Raspberry Pi 和开发系统在同一网络上,则会显示您的 Raspberry Pi 以供选择。
选择它并单击 .
该应用程序已下载到您的 Raspberry Pi。
启动程序(按 F5 钥匙)。
伺服电机开始从左到右稳定旋转。这
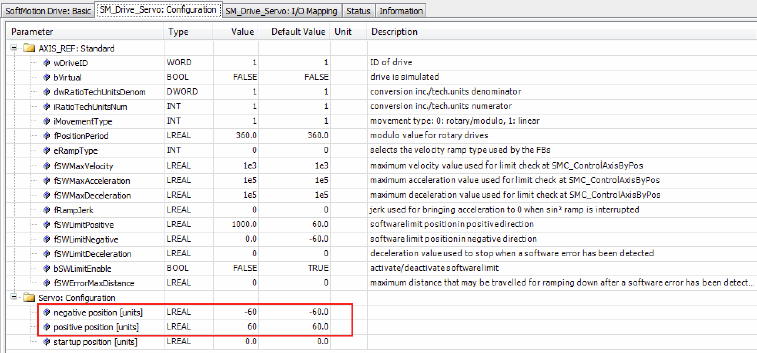
PLC_PRG在 SFC 中实施的程序对此负责。它打开轴,然后在指定为终端位置的 -60 和 +60 位置之间移动它SM_Drive_Servo轴配置。位置预设通过 PWM 接口传输,与建模伺服系统一样。 1 到 2 毫秒长的高电平脉冲以固定频率传输(默认值:50 Hz;Adafruit PWM SoftMotion 设备的参数)。 1 ms 代表下端位置,2 ms 代表上端位置。运动范围因电机类型而异。如果电机以角度控制,则必须测量运动范围。为此,驱动到末端位置(在示例中为 -60、+60)并在配置屏幕中输入测量位置:
打开任何浏览器(可能在智能手机上)并指定地址
<network address>:8080/webvisu.htm.可视化打开并显示生成的指定位置。你可以控制速度。