5軸変換
5軸変換を使用すると、3つの線形空間軸(X、Y、Z)とツールヘッドで構成されるキネマティクスを制御できます。ツールヘッドは、ツールを保持する2つの軸で構成されています。工具軸はZ軸を中心に回転し、工具は次のスキームに従って他の軸を傾斜させます。
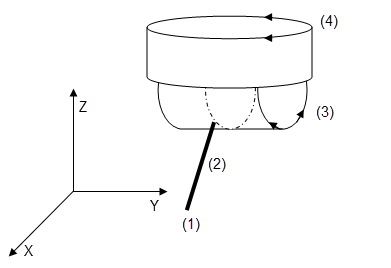
パラメータ:の長さ dTool =処理ポイント(ツールチップ= TCP)から回転軸の傾きまでの距離。
. 5つの位置値による5軸変換の制御:
X / Y / Z-に含まれる処理ポイント(TCP)の位置
pi.dX, pi.dY, pi.dZ。単位:軸の単位を配置します。に含まれる球面座標(傾斜と方位角)によるツールの方向
pi.dBとpi.dC。単位:角度。

. ゼロ位置
処理ポイント(TCP)は次の位置にあります(
0/0/-dTool)。ツールは負のZ軸の方向に伸びます。回転軸の傾きは、正の方向に回転すると工具が正のX軸の方向に移動するように配置されます。
例 13. 例
ムーブメントN30の場合、最初にX方向を指す傾斜軸が回転し、ムーブメントの終了時に負のX方向に傾斜したままになります。
N0 PB360 PC360 (set axis B and C in modulo mode 360) N10 F10 FB100 FC100 (velocity in X/Y/Z: 10, in B and C 100) N20 G0 X0 Y0 Z0 C0 B30 (start position) N30 G1 X20 B-30 (target position)
詳細については、以下を参照してください。 SMC_TRAFO_5Axes(FB) と SMC_TRAFOF_5Axes(FB)