キネマティック構成
キネマティック構成は、軸グループ内の軸の相互のレイアウトを記述します。キネマティクスに応じて、同じTCP位置に対して複数の構成が可能です。
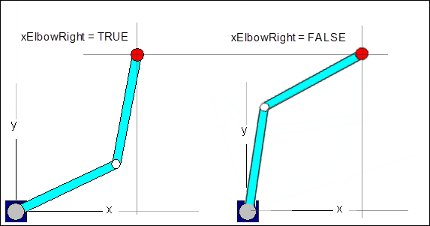
たとえば、SCARA2の2つの可能な構成が示されています。
軸グループにはアクティブな構成があり、必ずしも現在の軸の位置に対応している必要はありません。移動が指示された場合、目標位置は軸座標に変換される場合があります。コマンド時にアクティブな構成が使用されます。
このアクティブな設定は、機能ブロックで設定できます SMC_SetKinConfiguration。初期化中およびキネマティクスが変更されるたびに、軸グループは標準構成を適用します。構成を持つすべてのキネマティクスには、標準構成があります。
ヒント
2つの構成間のCP移動はできません。この場合、ポジショニングはPTPムーブメントを使用して行う必要があります。
ヒント
現在の構成は、機能ブロックで決定することができます MC_GroupReadActualPosition。
1つのキネマティックデザインの構成を設定する
構成を使用するすべてのキネマティックデザインには、構成データを計算するための独自のPOUがあります。この機能ブロックの名前は、キネマティクスの名前と接尾辞に対応しています。 _config。 POUは、さまざまな構成をデータ型に変換します ConfigData。このデータ型は機能ブロックに渡されます SMC_SetKinConfiguration。
機能ブロックを呼び出す
Kin_Scara2_Z_Config図書館からSM3_Transformation。入力xElbowRight= TRUE機能ブロックは、タイプの構成データを生成します
ConfigData。機能ブロックを呼び出す
SMC_SetKinConfiguration図書館からSM3_Robotics。入力を書き込むConfigData以前に決定された構成データを使用します。SCARA2のアクティブな構成を設定します。
VAR
config: TRAFO.Kin_Scara2_Z_Config;
skc: SMC_SetKinConfiguration;
END_VAR
config(xElbowRight := TRUE);
skc(AxisGroup := Scara2, Execute := TRUE, ConfigData := config.Config);結合された運動学の取り扱い
位置キネマティクスと方向キネマティクスが同時に使用される場合、結合キネマティクスが存在します。これにより、を呼び出すことにより、両方の構成から「結合」構成が得られます。 Kin_Coupled_Config 図書館から SM3_Transformation。位置キネマティクスと方向キネマティクスの構成は、入力の機能ブロックに提供されます。
詳細については、以下を参照してください。 360°を超える値の範囲を持つ回転軸