の定義 SoftMotion カム
カムは、あるドライブ(スレーブ)の別のドライブ(マスター)への機能依存性を表します。この関係は、定義された範囲のマスター値をスレーブ値にマップする連続関数(または曲線)によって記述されます。より正確に言うと、マスター軸を適切なセグメントに分割した後、これらの関数のグラフは、これらの各間隔で線または5次多項式で表すことができます。
カムグラフでは、マスター値が横軸に適用され、スレーブ値が縦軸に適用されます。
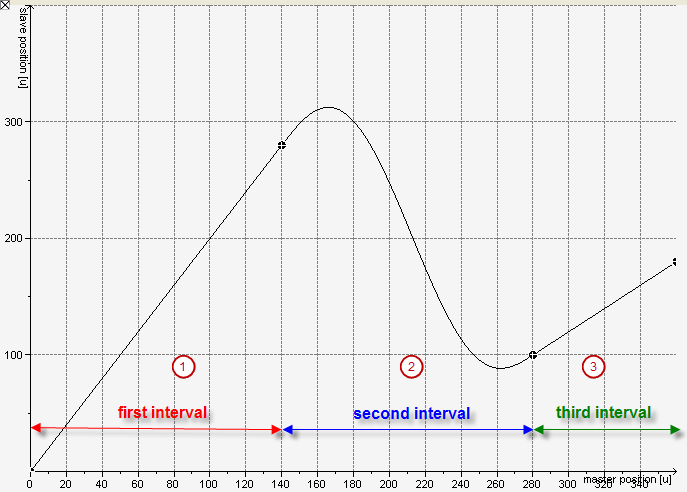
この例では、マスター値は0〜360です。この範囲は、次の3つの間隔に分割されます。
(1)最初の間隔:[0、140]
(2)2番目の間隔:[140、280]
(3)3番目の間隔:[280、360]
関数(グラフ)は1番目と3番目の間隔で線形であり、そのグラフは線として表示されます。その結果、その1次導関数(勾配)は一定であり、すべての高次導関数は0です。
2番目の区間では、グラフは5次多項式で記述されます。したがって、その1次導関数は4次多項式、2次導関数(曲線)は3次多項式、3次導関数は2次多項式などです。
関数がマスターの位置に応じたスレーブの動きを記述する場合、その1次導関数はスレーブの速度に対応し、2次導関数はその加速度に対応します。
この物理的な解釈を念頭に置くと、マッピングが継続的でなければならないことは明らかです。これは、そのグラフにジャンプが許可されていないことを意味します。特に、2つの間隔が交わる各ポイントで連続性も満たされる必要があります。さらに、一般に連続性は一次および二次導関数によっても必要とされます。 (実際、区間の始点と終点でのこれらの3つの連続性条件は、2つの直線セグメントの間に挿入される5次多項式の係数を決定します。
さらに、任意の位置でカムにタペット(バイナリスイッチ)を追加できます。このようにして、タペットのみを含むカムテーブルを作成できます。次に、マスター値の範囲全体でスレーブ位置がゼロに設定されます。