構成と試運転
CODESYS SoftMotion Light の構成 CODESYS
独自のEtherCATスレーブまたはCANスレーブデバイスなどのドライブデバイスをデバイスツリーに追加します。
その下に、 CODESYS SoftMotion Light 軸。次に、をクリックします 。
追加したEtherCATまたはCANデバイスをエディターで開きます(Accelnet 例のモジュール)。
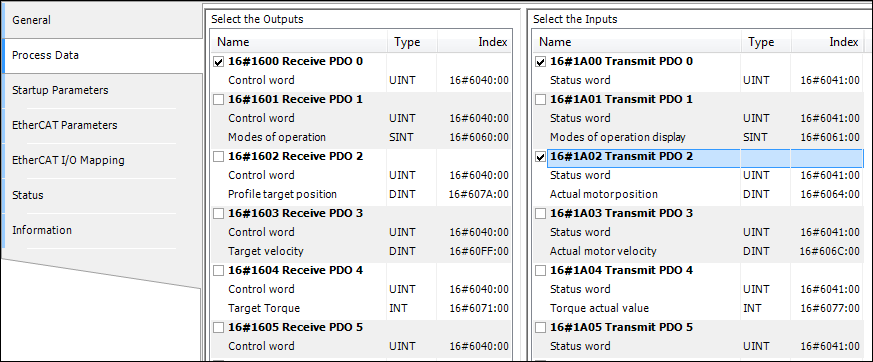
EtherCATデバイスまたはCANデバイスのプロセスデータ(PDO)を設定します。
変更が発生したときに「ステータスワード」とオプションで「コントロールワード」も転送されるように、プロセスデータを設定する必要があります。コントロールワードがPDO経由で転送されない場合、変更されるとすぐにSDO経由で転送されます。モジュラー軸の場合、使用時に現在位置を送信する必要があります
MC_MoveAbsolute_SMLまたMC_MoveRelative_SML。現在位置を同期的に、または変更が発生したときに送信できます。変更が発生したときに位置が送信される場合は、適切な構成を行う必要があります 禁止時間 感染が頻繁に発生するのを防ぐため。 PDOを介して他のオブジェクトを送信する必要はありません。EtherCATデバイスエディタでのPDO設定の例:
に切り替えます EtherCAT I / Oマッピング タブ。の 変数を更新する、 を選択 2をアクティブにします(常にバスサイクルタスクで) オプション。
に切り替えます 全般的 タブ。
EtherCATドライブの場合、分散クロックを使用する必要はありません。ただし、一部のドライブではそれらが必要になる場合があります。
ヒント
CANドライブの場合、ハートビートをアクティブにする必要があります。別の方法として、現在の位置が送信されている場合は、SYNCテレグラムをアクティブにすることができます。この場合、ハートビートは必要ありません。 3番目のオプションは、ノード保護を使用することです。対応する構成は、 全般的 CANopenスレーブのタブ。
重要
SYNCテレグラム、ハートビート、ノードガードのいずれもアクティブでない場合は、 ドライブが「動作可能」のステータスにあるかどうかを判断できません。
を開きます CODESYS SoftMotion Light エディターの軸(SML_Drive_GenericDSP402 例では)。
構成はに似ています CODESYS SoftMotion Light 軸(SoftMotionデバイスエディターの説明を参照)。
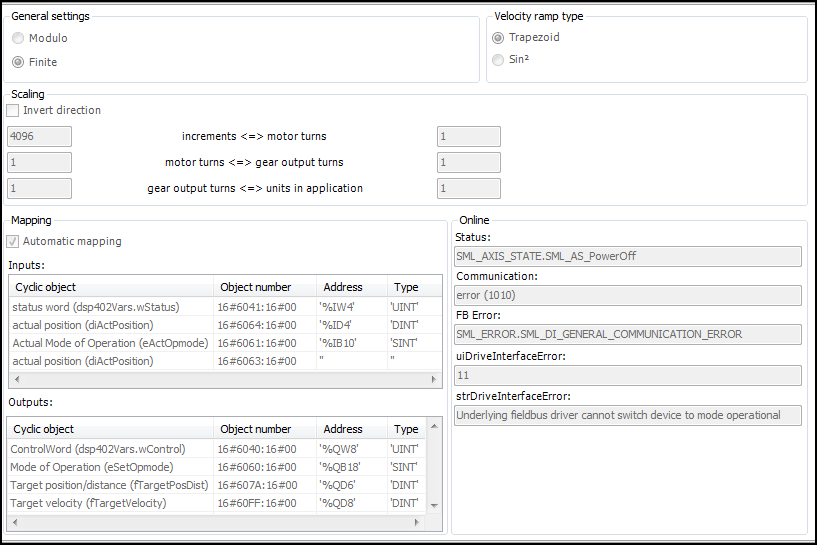
に次のパラメータを設定します SoftMotionLight タブ:
一般設定
モジュロ: モジュロ値[u] (モジュロ期間)オン。
有限の
速度ランプタイプ:速度プロファイルを決定します。
台形:台形の速度プロファイルにつながります(各セグメントで一定の加速度があります)
Sin²:ドライブでサポートされている場合、この設定により、sin²関数で記述された速度プロファイルが得られます(一定の加速度曲線を使用)。
スケーリング:増分をアプリケーションの単位に設定します。
ここでは、整数の位置値を変換するための係数を定義します(増分)テクニカルユニットに(アプリケーションの単位)。位置の値はドライブによって受信され、デバイスに送信されました。テクニカルユニットは、IECプログラムによって使用されます。他のパラメータを設定することにより(モーターの回転、 ギア入力回転、 ギア出力回転)、ギアボックスを含めることもできます。
方向を反転: モーターが符号を反転した定義済みの値を受け取るため、反対方向に回転します。
に切り替えます EtherCAT I / Oマッピング EtherCATスレーブのタブ。の自動生成されたマッピングを確認してください CODESYS SoftMotion Light プロセスメモリ内のアドレスのパラメータ。特定の例外的なケースでは、このマッピングを手動で適合させることができます。
もしも 自動マッピング が有効になると、EtherCATスレーブの入力と出力が自動的にマッピングされます。
試運転
オンラインモードでは、ステータス、通信、およびエラーに関する情報が SoftMotionLight ドライブのタブ。
試運転をサポートするには、 SML_StartupDrive ファンクションブロック(SML_Basic.library) そしてその VISU_SML_StartupDrive ビジュアライゼーションテンプレート(ビジュアライゼーションのフレーム要素に挿入)。このようにして、ほとんどの CODESYS SoftMotion Light などの機能 Power、 Home、 MoveAbsolute、 MoveRelative、 と MoveVelocity、およびパラメータの読み取りと書き込み。