EtherCAT Safety モジュール
使用方法 EtherCAT Safety 奴隷
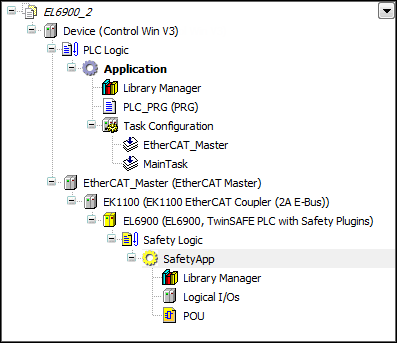
の EtherCAT Safety モジュールEL6900とEL6910は、 EtherCAT バスカプラ(例:EK1100)。 EtherCAT Safety EK1960は、 EtherCAT マスター。
これを行うには、バスカプラまたはマスターを選択し、 デバイスを追加 コンテキストメニューで EtherCAT Safety モジュール。または、バスカプラまたはマスターを選択し、クリックしてコントローラを選択して追加することもできます。 デバイスのスキャン コンテキスト メニューで。
の 安全ロジック 論理ノード、 SafetyApp 安全アプリケーションオブジェクト、ライブラリマネージャ、および 論理I/O ノードは自動的に EtherCAT Safety モジュール。
更新することができます EtherCAT Safety クリックしてデバイスの説明を新しいバージョンにモジュール化します デバイスの更新 コンテキスト メニューで、ライブラリが新しいバージョンに置き換えられる場合があります。
の設定エディタ EtherCAT Safety モジュールには 一般的な、 パラメータ、 安全パラメータ、 I/Oマッピング、 オンライン、 CoEオンライン、 状態、 そして 情報タブ。ESIファイルの内容に応じて、 診断履歴 タブも表示されることがあります。
の 一般的な タブには、デバイス記述ファイルで定義されているスレーブの基本設定が表示されます。これらのパラメータと他のタブの詳細な説明は、 EtherCAT 奴隷。
の タブ: 安全パラメータ タブには、このスレーブに固有の設定とデータ転送のコマンドが含まれています。
安全モジュールを EtherCAT 奴隷
の EtherCAT Safety モジュールは EtherCAT スレーブ。このため、 CODESYS モジュールのフィールドバス サポートも表示されます。これは、問題が発生した場合に役立つ可能性があります。
詳細については、以下を参照してください。
AX8xxxドライブの使用
AX8xxxドライブは EtherCAT ドライブ安全機能(SOS、SLSなど)を統合したスレーブ
ESIファイルをインポートした後、ドライブを TwinCATSTO用のモジュール。ただし、 CODESYS Safety for EtherCAT Safety Module したがって、AX8xxxの特別な安全機能は利用できません(ドライブがプログラムされていない限り) TwinCAT 追加機能についてはこちらをご覧ください。
デバイスツリーでは、端末は EtherCAT モジュール (EtherCAT Safety SC モジュール)と EtherCAT 設定および標準 I/O チャネルとして、また安全コントローラへの TSC 接続用のサブモジュールとして使用できます。
ヒント
端末の詳細な説明、技術データ、標準I/Oチャネルと構成に関する情報については、対応するデバイスのドキュメントを参照してください。 TwinSAFE-SC 端末については、 TwinSAFE アプリケーションマニュアル Beckhoff。
安全パラメータの設定
安全に関する特定のパラメータ EtherCAT Safety モジュール
詳細については、以下を参照してください。 タブ: 安全パラメータ