FB_CAMMONITOR
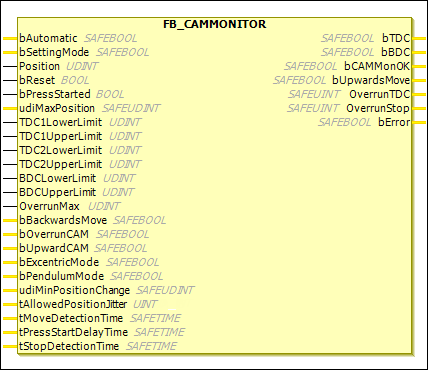
説明機能ブロック
の FB_CAMMONITOR ファンクションブロックは、電子カムグループを実装するために使用されます。偏心モードに加えて、振り子モードもサポートされています。
偏心モード:
偏心モードでは、回転方向は 1 つだけ許可されます。
上方反転点(TDC)後、遅くとも1サイクル後にポジションが停止することを確認するチェックが実行されます。 上死点) プラス最大オーバーラン (
OverrunMax)。OverrunTDC現在のオーバーランまたはTDC後の現在の位置を出力します。下方反転ポイント(BDC: 下死点)は下限と上限で指定されます。BDCを超えると、プレスは上昇します。この情報は、
bUpwardsMove出力。プレスがTDCに到達または上死点を超えずに停止した場合、または回転方向が逆転した場合、
bCamMonOK出力はすぐにFALSE。停止状態に達した後、下降エッジが検出された場合にのみ新しいサイクルが許可されます。
bReset入力。の
bBackwardsMove入力は、プレス機の後退が許可されていることをファンクションブロックに通知するために使用されます。これは、位置がTDC1UpperLimitそしてBDCLowerLimit後退運動は、TDC1UpperLimitが達成された。偏心モードでは、上向きのカムを
bUpwardCAM入力とオーバーランカムを接続できますbOverrunCAM入力してください。bUpwardCAM入力がアクティブの場合、上向きカムがBDC後に設定され、0°で再びリセットされることを確認するチェックが実行されます。bOverrunCAM入力がアクティブになると、オーバーランカムが設定されていることを確認するチェックが実行されます。TDC1LowerLimitプレスが停止している間は設定されたままです。オーバーランカムは、次のサイクルが開始された後にのみリセットできます。プレスの後退は、bUpwardCAMそしてbOverrunCAM入力はFALSE後退運動は、bOverrunCAM入力はTRUE。振り子モード:
振り子モードでは両方向の回転が許可されます。2つの上部反転ポイント(TDC: 上死点)をここで指定します。
プレスの駆動曲線は製品ごとに変更できる、または変更する必要があるため、振り子ストロークの最大範囲は両方の TDC の制限に合わせて設定されます。
確認のためにチェックが行われます
TDC1そしてTDC2超過することはありません。それでも超過した場合は、bCamMonOK出力はFALSEサイクルの開始時(bReset入力)の時点でプレスは下死点に達するまで任意の動き(パルス、逆回転など)で始動できます。その後は上向きの動きのみが許可されます。上向きの動きは、bUpwardsMove出力。下方反転ポイント(BDC: 下死点) は下限値と上限値で指定されます。
再起動は、
bReset入力。プレスが下方向に動いていて、下降エッジが検出されない場合は、bReset入力すると、bCamMonOK出力FALSE。オプションの
bUpwardCAMそしてbOverrunCAM振り子モードでは、上向きカムとオーバーランカムを接続するための入力はサポートされていません。誤ってアクティブにすると、エラーが設定されます。
FB_CAMMONITOR
の FB_CAMMONITOR カムを安全に出力できる安全な評価モジュールをユーザーに提供します(bTDC、 bBDC、 そして bUpwardsMove設定された固定値と現在の位置に応じて、速度( )/速度( )が変化します。
機能ブロック出力: bUpwardsMove
bUpwardsMove 出力は、プレスが BDC を通過した後、上向きに動いているという情報をユーザーに提供します。この信号は、たとえばライト カーテンをミュートしたり、プレスに制御コマンドを転送したりするために使用できます。
プレスの位置検出
位置検出は、必要な SIL またはパフォーマンス レベルに従って実装する必要があります。ユーザーまたは機械メーカーは、この条件が満たされていることを証明する必要があります。
位置値は、例えば複数のアナログ値から確実に検証するか、または別の安全な方法で機能ブロックに提供する必要があります。最初の方法は、例えば、 COMPARE 機能ブロック。さらに、 bPressStarted 入力は期待値を生成するために使用できます。この場合、移動の要求が機能ブロックに伝達されます。次に、機能ブロックは設定されたパラメータ内で位置の変化も発生することを監視します。
エキセントリックモード/振り子モード
偏心モードの場合、 bExcentricMode 入力が設定され、 TDC2UpperLimit そして TDC2LowerLimit 入力は非アクティブまたは 0 でなければなりません。
の bPendulumMode 入力は振り子モードに設定されており、 TDC2UpperLimit そして TDC2LowerLimit 入力はアクティブであり、0 以外である必要があります。
EL6900
の FB_CAMMONITOR 機能ブロックはEL6900ではサポートされていません。
名前 | データ・タイプ | 初期値 | 説明、パラメータ値 |
|---|---|---|---|
|
|
|
|
|
|
| セットアップモードでのパラメータ転送 入力が |
|
|
| プレス位置: 位置値は、たとえば複数のアナログ値から確実に検証するか、必要な SIL またはパフォーマンス レベルに応じて別の安全な方法で機能ブロックに提供する必要があります。 許可されるデータ型: |
|
|
| リセット入力: 立ち下がりエッジは、 |
|
|
| 入力がアクティブの場合、入力の論理1に対して移動または位置の変更が期待されます。これを行うには、 |
|
|
| プレスの 360° 移動中の最大許容位置値。 定数値のみが許可されます(変数は許可されません)。 |
|
|
| 偏心モード:上方反転点の下限(TDC: 上死点)。これは上部反転ポイントの左側にあります。 振り子モード: プレスの左半分の上限反転ポイントの下限。値は下限反転ポイントより大きく、 許可されるデータ型: 定数値と変数が許可されます。 |
|
|
| 偏心モード: 上反転点の上限。上反転点の右側に位置します。 振り子モード: プレスの左半分の上部反転ポイントの上限。値は TDC1LowerLimit より大きく、udiMaxPosition より小さくする必要があります。 許可されるデータ型: 定数値と変数が許可されます。 |
|
|
| 偏心モード: 使用しない 振り子モード: プレスの右半分の上部反転ポイントの下限。値は 許可されるデータ型: 定数値と変数が許可されます。 |
|
|
| 偏心モード: 使用しない 振り子モード: プレスの右半分における上反転点の上限。値は0より大きく、 許可されるデータ型: 定数値と変数が許可されます。 |
|
|
| . 下反転ポイントの下限
許可されるデータ型: 定数値と変数が許可されます。 |
|
|
| . 上値反転ポイントの上限
許可されるデータ型: 定数値と変数が許可されます。 |
|
|
| 偏心モード: 振り子モード: 未使用 許可されるデータ型: 定数値と変数が許可されます。 |
|
|
| 偏心モード:この入力により、プレス機を後方に移動できます。これは、 振り子モード: 未使用 |
|
|
| 偏心モード: オプション。オーバーラン カムをここで接続できます。オーバーラン カムが TDC 後に設定され、プレスが停止している間は設定されたままであることを確認するチェックが実行されます。オーバーラン カムは、次のサイクルが開始された後にのみリセットできます。 振り子モード: 未使用 |
|
|
| 偏心モード: オプション。上向きカムをここに接続できます。カムが BDC に設定され、0° にリセットされていることを確認するためのチェックが実行されます。 振り子モード: 未使用 |
|
|
|
そのうちの1つだけが 定数のみが許可されます(変数は許可されません) |
|
|
|
そのうちの1つだけが 定数のみが許可されます(変数は許可されません) |
|
|
| もし、 |
|
|
| 停止時の位置の許容ジッター(ミリ秒) 定数のみが許可されます(変数は許可されません) |
|
|
| もし、 |
|
|
| もし、 |
|
|
| 停止検出の時間枠(ミリ秒)(位置は値だけ移動できる) 定数のみが許可されます(変数は許可されません) |
名前 | データ・タイプ | 初期値 | 説明、パラメータ値 |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
ファンクションブロックがプログラムされているグループを開始した後、 |
|
|
| 偏心操作: 振り子モード:どちらの半分の動きが始まったかに応じて、もう半分の出力が設定されます。出力は |
|
|
| 偏心動作:違い 振り子モード: 未使用 |
|
|
| 立ち下がりエッジの位置の差 |
|
|
|
|