Utilizzo di assi aggiuntivi nella robotica
Le Robotics_AdditionalAxes.project un progetto di esempio mostra come gli assi aggiuntivi vengono configurati e utilizzati nella robotica. Gli assi aggiuntivi sono assi che vengono spostati in modo sincrono con movimenti coordinati
Il progetto si trova nella cartella di installazione di CODESYS sotto ..\CODESYS SoftMotion\Examples.
Struttura dell'applicazione
Il gruppo di assi è configurato nel Gruppo Axis oggetto. Viene utilizzato un robot SCARA a 3 assi (due assi rotativi e un asse Z lineare
Di seguito sono stati aggiunti anche due assi aggiuntivi Assi aggiuntivi e collegati ai due assi DriveAdd1 e DriveAdd2
Le PLC_PRG il programma contiene una semplice macchina a stati per il flusso del programma. Innanzitutto, il gruppo di assi è abilitato nello stato 0, quindi un movimento PTP verso la posizione (X=50, Y=50) viene eseguita. Questo viene poi mescolato in un movimento lineare verso la posizione (X=50, Y=-50).
Per il primo movimento del robot, un movimento relativo dell'asse aggiuntivo con distanza (10, 20) è comandato. Per il secondo movimento del robot, la distanza dell'asse aggiuntivo (-10, -20).
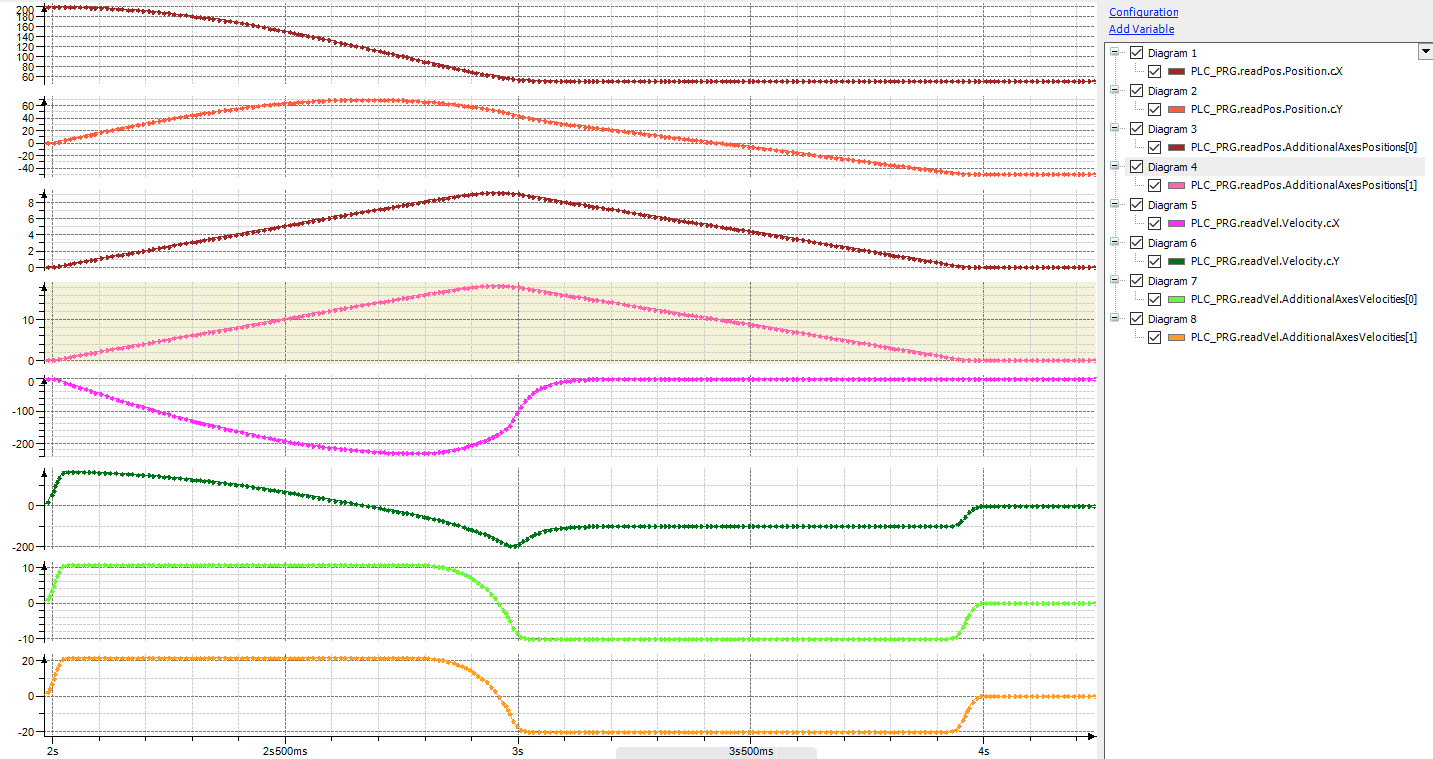
Le MC_GroupReadActualPosition e MC_GroupReadActualVelocity i blocchi funzione vengono utilizzati per leggere la posizione e la velocità della cinematica e degli assi aggiuntivi.
Messa in servizio
Crea l'applicazione e scaricala su un controller.
Apri la traccia e scaricala sul controller.
Avviare l'applicazione.
È possibile tracciare il movimento delle coordinate X e Y e dei due assi aggiuntivi nella traccia.