Scheda: Generale
Tipo di asse | |
Modalità virtuale |
Nota: è anche possibile impostare e ripristinare una modalità virtuale di un convertitore in codice IEC tramite il pulsante |
Modulo |
Valore modulo [u]: Valore di un ciclo (periodo modulo) Il valore viene salvato nel Nota: se si seleziona Modulo tipo di unità, quindi il prodotto |
Finito |
Finecorsa software attivato
|
Tipo di motore | |
Rotary |
|
Lineare |
|
Tipo di rampa di velocità Definisce il profilo di velocità per i moduli monoasse e master/slave che generano movimento: Nota: i tipi di rampa Sin² e Quadratico (liscio) non sono supportati per la robotica. | |
Trapezio |
|
Peccato² |
|
Quadratico |
|
Quadratico (liscio) |
|
Identificazione | |
ID | Identificatore intero. Deve essere univoco per ogni unità. Ad esempio, questo identificatore viene utilizzato nel registro del PLC per identificare l'unità in caso di errore |
Tempo morto | |
Cicli | Il tempo morto in cicli tra |
Limiti dinamici Vengono presi in considerazione i valori limite delle POU PLCopen Parte 4. Inoltre, sono utilizzati dalle POU della libreria con | |
Velocità [u/s] | Valore limite di velocità, accelerazione, decelerazione e strappo |
Accelerazione [u/s²] | |
Decelerazione [u/s²] | |
Coglione [u/s³] | |


Limiti del software | |
Attivato |
|
Reazione all'errore del software . Cause di un errore software
Per la reazione all'errore del software, Decelerazione, il Massimo.e si tiene conto della decelerazione dei limiti dinamici. Viene calcolata anche una decelerazione a partire dalla distanza massima. Il valore di decelerazione più elevato viene | |
Decelerazione [u/s²]: | Decelerazione per la rampa di errore |
Distanza massima [u] | Facoltativo L'unità deve essersi fermata entro questa distanza dopo che si è verificato un errore. |
Monitoraggio del ritardo di posizione Risposta del sistema a un ritardo rilevato. Un ritardo viene rilevato quando la differenza tra la posizione impostata e la posizione effettiva compensata supera il limite di ritardo. La posizione effettiva estrapolata viene calcolata con la seguente formula
Questo valore è la posizione effettiva dell'asse compensata dal tempo morto. Nota: se si sta monitorando il ritardo, è necessario determinare e inserire il tempo morto. Per una descrizione, consulta il capitolo seguente: Valori effettivi, valori impostati e tempo morto. Nota: il monitoraggio del ritardo non è disponibile per le unità virtuali. | |
Disattivato | Nessuna risposta Il monitoraggio dei ritardi è disattivato. |
Disabilita l'unità | Le |
Fai una sosta rapida | Le |
Resta abilitato | L'azionamento rimane acceso, ma tutti i movimenti di marcia vengono interrotti bruscamente. |
Limite di ritardo: | Monitoraggio dei ritardi nel controller Nell'unità può essere presente anche un monitoraggio indipendente, ma non è configurato in questa finestra di dialogo. |
Per ulteriori informazioni, vedere: Determinazione dei tempi morti del sistema
Le immagini seguenti mostrano l'effetto dei diversi tipi di rampa. La posizione è disegnata in verde, la velocità in blu e l'accelerazione in rosso.
trapezio La velocità è parzialmente lineare e continua, mentre l'accelerazione parzialmente costante indica salti. | 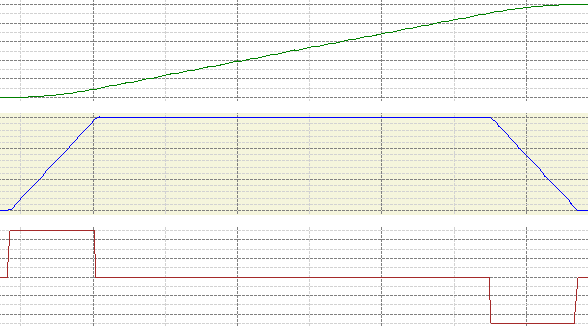 |
peccato² Le interruzioni nel profilo di velocità vengono attenuate (utilizzando la funzione sin² invece delle linee) per ridurre i salti in accelerazione. L'utente non può limitare il jerk per questo tipo di rampa. Lo strappo massimo impostato ha effetto solo se l'accelerazione non è uguale a zero all'inizio del movimento e la rampa di decelerazione e accelerazione interrotta non può continuare senza soluzione di continuità. Quindi, tenendo conto del limite di strappo, l'accelerazione viene ridotta a zero prima che inizi il movimento corrente. Rispetto al profilo di velocità trapezoidale, in questo caso la decelerazione richiede più tempo. | 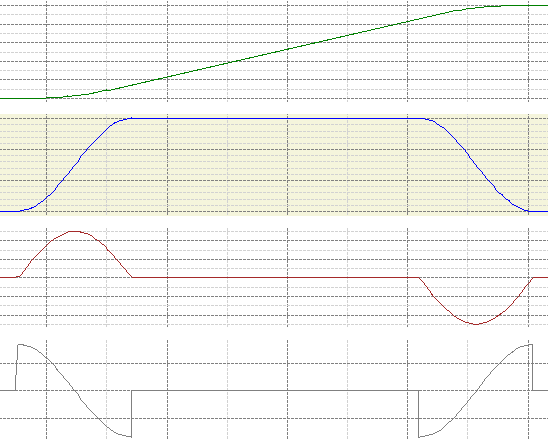 |
quadratico L'accelerazione è parzialmente lineare e continua e il jerk ha dei salti. La velocità è costituita da segmenti quadratici e lineari. | 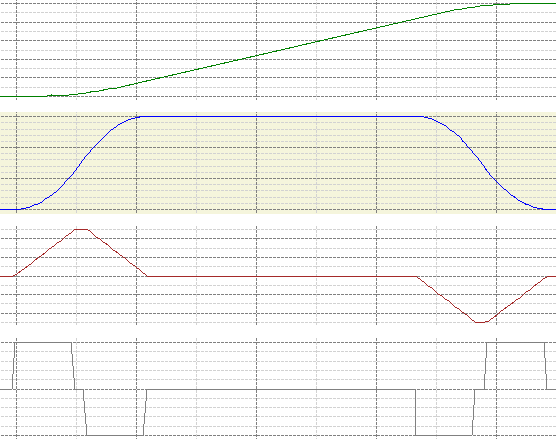 |
Quadratico (liscio) Le rampe di accelerazione lineare del tipo a rampa quadratica sono sostituite da una funzione "liscia" con un valore di pendenza pari a zero all'inizio e alla fine. Di conseguenza, anche il jerk è continuo. Nota: se un movimento viene interrotto, possono verificarsi interruzioni nello strappo. | 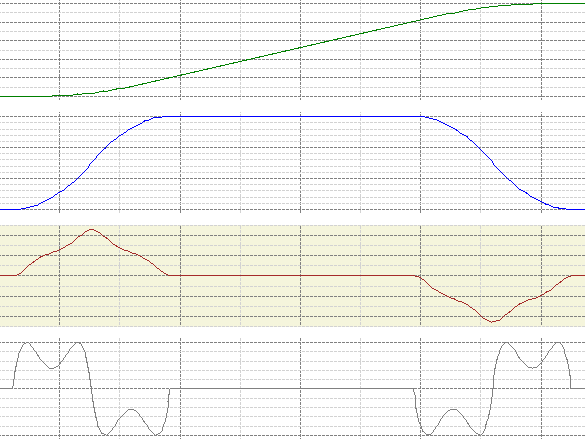 |
Per ulteriori informazioni, vedere: Interruzione dei movimenti