Configurazioni cinematiche
Una configurazione cinematica descrive la disposizione reciproca degli assi in un gruppo di assi. A seconda della cinematica sono possibili più configurazioni per la stessa posizione TCP.
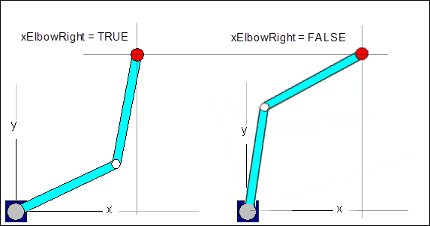
Ad esempio, vengono mostrate due possibili configurazioni per SCARA 2.
Il gruppo di assi ha una configurazione attiva che non deve necessariamente corrispondere alle posizioni attuali dell'asse. Se viene comandato un movimento, la posizione di destinazione può essere convertita in coordinate dell'asse. Viene utilizzata la configurazione attiva al momento del comando.
Questa configurazione attiva può essere impostata con il blocco funzione SMC_SetKinConfiguration. Durante l'inizializzazione e ogni volta che si cambia la cinematica, il gruppo di assi applica la configurazione standard. Tutta la cinematica con una configurazione ha una configurazione standard.
Suggerimento
Non è possibile un movimento CP tra due configurazioni. In questo caso il posizionamento deve essere effettuato tramite un movimento PTP.
Suggerimento
La configurazione attuale può essere determinata con il blocco funzione MC_GroupReadActualPosition.
Impostazione della configurazione per un progetto cinematico
Ogni progetto cinematico con una configurazione dispone di una propria POU per il calcolo dei dati di configurazione. Il nome di questo blocco funzione corrisponde al nome della cinematica più il suffisso _config. La POU converte le diverse configurazioni nel tipo di dati ConfigData. Questo tipo di dati viene passato al blocco funzione SMC_SetKinConfiguration.
Richiamare il blocco funzione
Kin_Scara2_Z_Configdalla bibliotecaSM3_Transformation. IngressoxElbowRight= VEROIl blocco funzione fornisce i dati di configurazione di tipo
ConfigData.Richiamare il blocco funzione
SMC_SetKinConfigurationdalla bibliotecaSM3_Robotics. Scrivi l'inputConfigDatacon i dati di configurazione precedentemente determinati.Impostare la configurazione attiva dello SCARA 2.
VAR
config: TRAFO.Kin_Scara2_Z_Config;
skc: SMC_SetKinConfiguration;
END_VAR
config(xElbowRight := TRUE);
skc(AxisGroup := Scara2, Execute := TRUE, ConfigData := config.Config);Gestione della cinematica accoppiata
La cinematica accoppiata esiste quando la cinematica di posizione e la cinematica di orientamento vengono utilizzate contemporaneamente. Ciò si traduce nella configurazione "accoppiata" da entrambe le configurazioni tramite chiamata Kin_Coupled_Config dalla biblioteca SM3_Transformation. La configurazione della cinematica di posizione e della cinematica di orientamento viene fornita al blocco funzionale agli ingressi.
Per ulteriori informazioni, vedere: Assi rotanti con range di valori su 360°