Configurazione e messa in servizio
CODESYS SoftMotion Light configurazione in CODESYS
Aggiungere un dispositivo di azionamento all'albero dei dispositivi, ad esempio il proprio dispositivo EtherCAT Slave o CAN Slave.
Al di sotto, inserire a CODESYS SoftMotion Light asse. Quindi fare clic .
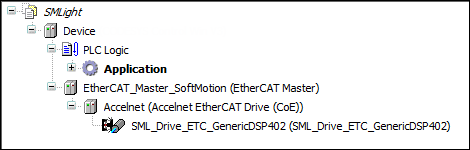
Aprire il dispositivo EtherCAT o CAN aggiunto nell'editor (Accelnet modulo nell'esempio).
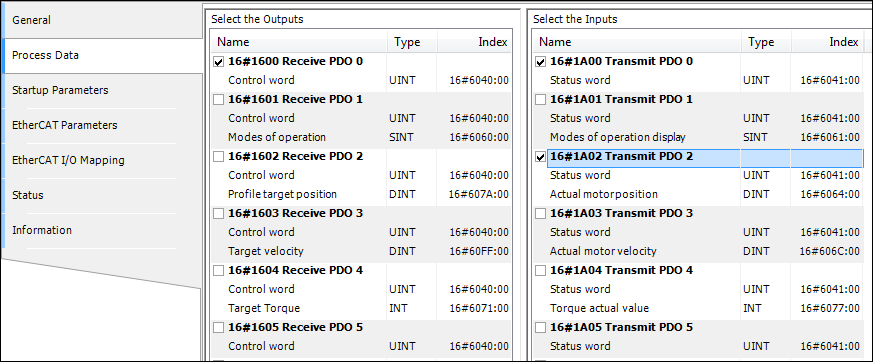
Configurare i dati di processo (PDO) del dispositivo EtherCAT o del dispositivo CAN.
È necessario configurare i dati di processo in modo tale che "Status Word" ed eventualmente anche "Control Word" vengano trasmessi in caso di modifiche. Se la Control Word non viene trasferita tramite PDO, verrà trasferita tramite SDO non appena cambia. Per gli assi modulari, è necessario trasmettere la posizione corrente durante l'utilizzo
MC_MoveAbsolute_SMLoMC_MoveRelative_SML. È possibile trasmettere la posizione attuale in modo sincrono o quando si verifica una modifica. Se la posizione viene trasmessa quando si verifica una modifica, è necessario configurare un adatto Inibire il tempo per evitare che la trasmissione si verifichi troppo spesso. Non è necessario trasmettere altri oggetti tramite PDO.Esempio di configurazione PDO nell'editor del dispositivo EtherCAT:
Passa al Mappatura I/O EtherCAT scheda. In Aggiorna variabili, seleziona il Attiva 2 (sempre nel task ciclo bus) opzione.
Passa al Generale scheda.
Per gli azionamenti EtherCAT non è necessario utilizzare clock distribuiti. Tuttavia, alcune unità potrebbero richiederli.
Suggerimento
Per le unità CAN, è necessario attivare l'heartbeat. In alternativa è possibile attivare il telegramma SYNC se viene trasmessa la posizione attuale. In questo caso, il battito cardiaco non è richiesto. Una terza opzione consiste nell'usare la protezione dei nodi. La configurazione corrispondente viene eseguita su Generale scheda dello slave CANopen.
Importante
Se non sono attivi né un telegramma SYNC, né un heartbeat, né la protezione dei nodi non è in grado di determinare se l'azionamento si trova o meno nello stato "operativo".
Apri il CODESYS SoftMotion Light asse nell'editor (SML_Drive_GenericDSP402 nell'esempio).
La configurazione è simile a a CODESYS SoftMotion Light asse (vedere la descrizione dell'editor del dispositivo SoftMotion).
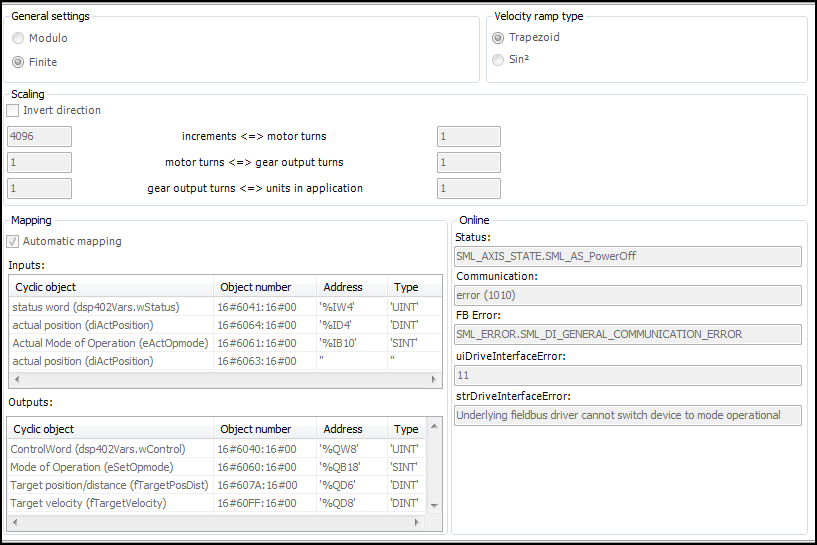
Impostare i seguenti parametri su SoftMotionLight scheda:
Impostazioni generali
Modulo: Valore modulo [u] (periodo modulo) su.
Finito
Tipo di rampa di velocità: Determina il profilo di velocità.
Trapezoidale: Porta a un profilo di velocità trapezoidale (con accelerazione costante in ogni segmento)
Peccato²: Se supportata dall'azionamento, questa impostazione porta a un profilo di velocità descritto dalla funzione sin² (con una curva di accelerazione costante).
Ridimensionamento: consente di impostare gli incrementi sulle unità nell'applicazione.
Qui si definisce il fattore per la conversione dei valori posizionali interi (Incrementi) in unità tecniche (Unità in applicazione). I valori di posizione sono stati ricevuti dall'azionamento e inviati al dispositivo. L'unità tecnica è utilizzata dal programma IEC. Impostando gli altri parametri (Rotazioni motorie, Rotazioni dell'ingranaggio, Rotazioni in uscita dell'ingranaggio), puoi anche includere una scatola del cambio.
Inverti direzione: Fa sì che il motore riceva i valori predefiniti con segno invertito e quindi ruoti in senso contrario.
Passa al Mappatura I/O EtherCAT scheda dello slave EtherCAT. Controllare la mappatura generata automaticamente di CODESYS SoftMotion Light parametri per indirizzi nella memoria di processo. In alcuni casi eccezionali, questa mappatura può essere adattata manualmente.
Se Mappatura automatica è abilitato, gli ingressi e le uscite dello slave EtherCAT vengono mappati automaticamente.
La messa in produzione
In modalità online, le informazioni sullo stato, la comunicazione e gli errori vengono visualizzate sul SoftMotionLight scheda dell'unità.
Per supportare la messa in servizio, è possibile utilizzare il SML_StartupDrive blocco funzione (SML_Basic.library) e il VISU_SML_StartupDrive modello di visualizzazione (inserire in un elemento frame di una visualizzazione). In questo modo, puoi accedere facilmente alla maggior parte dei CODESYS SoftMotion Light funzioni, come Power, Home, MoveAbsolute, MoveRelative, e MoveVelocity, oltre a leggere e scrivere parametri.