EtherCAT Safety Modulo
Usando il EtherCAT Safety Schiavo
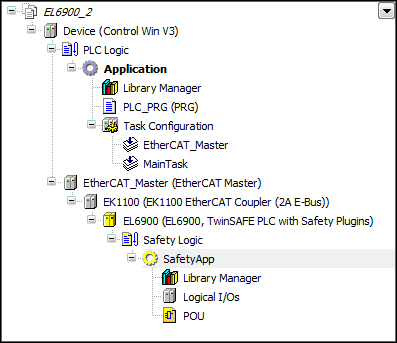
IL EtherCAT Safety I moduli EL6900 e EL6910 vengono aggiunti sotto un EtherCAT accoppiatore bus (es. EK1100). IL EtherCAT Safety EK1960 viene aggiunto sotto il EtherCAT Maestro.
Selezionare a tale scopo l'accoppiatore bus o il master e fare clic Aggiungi dispositivo nel menu contestuale con la selezione di EtherCAT Safety Modulo. In alternativa è possibile anche selezionare l'accoppiatore bus o il master e selezionare e aggiungere il controller facendo clic Cerca dispositivi nel menu contestuale.
IL Logica di sicurezza nodo logico, il SafetyApp oggetto dell'applicazione di sicurezza, il Gestore della libreria e il I/O logici nodo vengono aggiunti automaticamente sotto un EtherCAT Safety Modulo.
Puoi aggiornare il EtherCAT Safety Modulo per una versione più recente della descrizione del dispositivo facendo clic Aggiorna dispositivo nel menu contestuale. Nel processo, le librerie potrebbero essere sostituite da versioni più recenti.
L'editor di configurazione di EtherCAT Safety Il modulo contiene il Generale, Parametro, Parametro di sicurezza, Mappatura I/O, in linea, CoE in linea, Stato, E Informazioneschede. A seconda del contenuto del file ESI, il Storia della diagnosi potrebbe essere visualizzata anche la scheda.
IL Generale La scheda mostra le impostazioni di base per lo slave come definite nel file di descrizione del dispositivo. Una descrizione dettagliata di questi parametri e delle altre schede si trova nella descrizione generale di an EtherCAT Schiavo.
IL Scheda: Parametro di sicurezza La scheda contiene le impostazioni specifiche per questo slave nonché i comandi per il trasferimento dei dati.
Utilizzo del modulo di sicurezza come EtherCAT Schiavo
IL EtherCAT Safety Il modulo è un EtherCAT Schiavo. Per questo motivo, le informazioni diagnostiche da CODESYS Viene visualizzato anche il supporto del bus di campo per il modulo, che potrebbe essere interessante in caso di problemi.
Per ulteriori informazioni, vedere:
Utilizzo delle unità AX8xxx
L'unità AX8xxx è un EtherCAT Slave con funzioni di sicurezza dell'azionamento integrate (SOS, SLS, ecc.)
Dopo aver importato il file ESI, l'unità può essere collegata a a TwinCAT Modulo per STO. Tuttavia, non può essere programmato con CODESYS Safety for EtherCAT Safety Module Aggiungi su. Pertanto le funzioni speciali di sicurezza dell'AX8xxx non sono disponibili (a meno che l'azionamento non sia programmato con TwinCAT per funzioni aggiuntive).
Nell'albero dei dispositivi, il terminale è rappresentato come EtherCAT Modulo (EtherCAT Safety SC Modulo) con il EtherCAT impostazioni e canali I/O standard e come sottomodulo per il collegamento TSC al controller di sicurezza.
Suggerimento
Per una descrizione completa dei terminali con dati tecnici e informazioni sui canali I/O standard e sulla configurazione, consultare la documentazione del dispositivo corrispondente. Per esempi di applicazione con TwinSAFE-SC terminali, vedere il TwinSAFE manuale applicativo da Beckhoff.
Configurazione del parametro di sicurezza
Parametro specifico di sicurezza del EtherCAT Safety Modulo
Per ulteriori informazioni, vedere: Scheda: Parametro di sicurezza