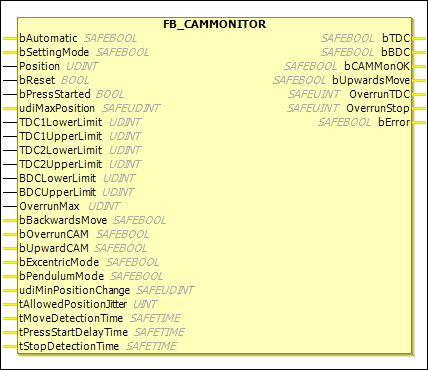
FB_CAMMONITOR
Descrizione Blocco Funzione
ll FB_CAMMONITOR blocco funzione viene utilizzato per implementare un gruppo di camme elettroniche. Oltre alla modalità eccentrica è supportata anche la modalità pendolo.
Modalità eccentrica:
In modalità eccentrica è consentito un solo senso di rotazione.
Viene effettuato un controllo per garantire che la posizione si fermi al più tardi dopo un ciclo dopo il punto di inversione superiore (TDC: Punto morto superiore) più il superamento massimo (
OverrunMax).OverrunTDCemette il superamento della corrente o la posizione corrente dopo il TDC.Il punto di inversione inferiore (BDC: Punto morto inferiore) è specificato con un limite inferiore e superiore. Una volta superato il BDC, la pressa si muove verso l'alto. Queste informazioni vengono emesse in
bUpwardsMoveproduzione.Se la pressa si ferma senza aver raggiunto o superato nuovamente il PMS oppure se viene invertito il senso di rotazione, allora
bCamMonOKl'uscita viene immediatamente impostata suFALSE.Una volta raggiunto l'arresto, un nuovo ciclo è consentito solo dopo il rilevamento di un fronte di discesa
bResetingresso.IL
bBackwardsMoveL'ingresso viene utilizzato per notificare al blocco funzione che è consentito un movimento all'indietro della pressa. Ciò è consentito solo se la posizione è intermediaTDC1UpperLimitEBDCLowerLimit. Il movimento all'indietro termina quandoTDC1UpperLimitè raggiunto.Nella modalità eccentrica è possibile collegare una camma verso l'alto
bUpwardCAMè possibile collegare un ingresso e una camma di inerziabOverrunCAMingresso. Se labUpwardCAMè attivo, viene eseguito un controllo per verificare che la camma verso l'alto sia impostata dopo il PMI e reimpostata nuovamente a 0°. Se labOverrunCAMè attivo, viene eseguito un controllo per assicurarsi che la camma di inerzia venga impostata successivamenteTDC1LowerLimite rimane impostato mentre la pressa è ferma. La camma di inerzia può essere ripristinata solo dopo l'avvio del ciclo successivo. Un movimento all'indietro della stampa è consentito solo se ilbUpwardCAMEbOverrunCAMgli input sonoFALSE. Il movimento all'indietro termina quandobOverrunCAMl'input diventaTRUE.Modalità pendolo:
Nella modalità pendolo sono consentiti entrambi i sensi di rotazione. Due punti di inversione superiori (TDC: Punto morto superiore) sono qui specificati.
Poiché la curva con cui si prevede di azionare la pressa può o deve essere modificata per ciascun prodotto, l'escursione massima della corsa del pendolo è fissata per i limiti di entrambi i PMS.
Viene eseguito un controllo per accertarsene
TDC1ETDC2non vengono mai superati. Se ciò accade comunque, allora ilbCamMonOKl'uscita è impostata suFALSE. All'inizio del ciclo (fronte di discesa albResetingresso), la pressa può avviarsi con qualsiasi movimento (pulsante, inverso, ecc.) fino al raggiungimento del PMI. Successivamente è consentito solo il movimento verso l'alto. Il movimento verso l'alto viene emesso come segnale sulbUpwardsMoveproduzione.Il punto di inversione inferiore (BDC: Punto morto inferiore) è specificato con un limite inferiore e superiore.
Il riavvio è abilitato tramite
bResetingresso. Se la pressa si muove verso il basso senza che venga rilevato un fronte di discesabResetingresso, viene interrotto immediatamente impostando ilbCamMonOKuscita aFALSE.L'opzionale
bUpwardCAMEbOverrunCAMgli ingressi per il collegamento di una camma di salita e di una camma di inerzia non sono supportati in modalità pendolo. Se sono attivi per errore, viene impostato un errore.
FB_CAMMONITOR
IL FB_CAMMONITOR mette a disposizione dell'utente un modulo di valutazione sicuro che può emettere in modo sicuro le camme (bTDC, bBDC, E bUpwardsMove) in base ai valori fissi impostati e in funzione della posizione attuale.
Uscita del blocco funzione: bUpwardsMove
L'output bUpwardsMove fornisce all'utente l'informazione che la pressa è in movimento verso l'alto dopo aver superato il BDC. Questo segnale può essere utilizzato, ad esempio, per silenziare le barriere fotoelettriche o trasferire comandi di controllo alla pressa.
Rilevamento della posizione della pressa
Il rilevamento della posizione deve essere implementato in base al SIL richiesto o al livello di prestazioni. L'utilizzatore o il costruttore della macchina deve dimostrare che questa condizione è soddisfatta.
Il valore di posizione deve essere verificato in modo affidabile, ad esempio da più valori analogici, oppure deve essere messo a disposizione del modulo in un altro modo sicuro. La prima può essere implementata, ad esempio, mediante il COMPARE blocco funzione. Inoltre, il bPressStarted l'input può essere utilizzato per generare un'aspettativa. In questo caso la richiesta di un movimento viene comunicata al blocco funzione. Successivamente il blocco funzionale controlla che all'interno dei parametri impostati avvenga anche un cambiamento di posizione.
Modalità eccentrica/modalità pendolo
Per la modalità eccentrica, il bExcentricMode l'ingresso è impostato e il TDC2UpperLimit E TDC2LowerLimit gli ingressi devono essere inattivi o 0.
IL bPendulumMode l'ingresso è impostato per la modalità pendolo e il TDC2UpperLimit E TDC2LowerLimit gli ingressi devono essere attivi e non uguali a 0.
EL6900
IL FB_CAMMONITOR il blocco funzione non è supportato dall'EL6900.
Nome | Tipo di dati | Valore iniziale | Descrizione, valori dei parametri |
|---|---|---|---|
|
|
|
|
|
|
| Trasferimento dei parametri in modalità di configurazione Se l'ingresso è impostato su |
|
|
| Posizione della pressa: il valore della posizione deve essere verificato in modo affidabile, ad esempio da diversi valori analogici oppure deve essere messo a disposizione del blocco funzione in un altro modo sicuro in base al SIL richiesto o al livello di prestazione. Tipi di dati consentiti: |
|
|
| Ingresso di reset: deve essere rilevato un fronte di discesa |
|
|
| Se l'ingresso è attivo, è previsto un movimento o un cambiamento di posizione per un 1 logico sull'ingresso. Per fare questo, il |
|
|
| Valore massimo di posizione consentito durante un movimento di 360° della pressa. È consentito solo un valore costante (nessuna variabile). |
|
|
| Modalità eccentrica: limite inferiore del punto di inversione superiore (TDC: Punto morto superiore). Questo si trova a sinistra del punto di inversione superiore. Modalità pendolo: limite inferiore del punto di inversione superiore nella metà sinistra della pressa. Il valore deve essere maggiore del punto di inversione inferiore e minore di Tipi di dati consentiti: Valore costante e variabile consentita. |
|
|
| Modalità eccentrica: limite superiore del punto di inversione superiore. Questo si trova a destra del punto di inversione superiore. Modalità pendolo: limite superiore del punto di inversione superiore nella metà sinistra della pressa. Il valore deve essere maggiore di TDC1LowerLimit e minore di udiMaxPosition. Tipi di dati consentiti: Valore costante e variabile consentita. |
|
|
| Modalità eccentrica: non utilizzata Modalità pendolo: limite inferiore del punto di inversione superiore nella metà destra della pressa. Il valore deve essere maggiore di Tipi di dati consentiti: Valore costante e variabile consentita. |
|
|
| Modalità eccentrica: non utilizzata Modalità pendolo: limite superiore del punto di inversione superiore nella metà destra della pressa. Il valore deve essere maggiore di 0 e minore di Tipi di dati consentiti: Valore costante e variabile consentita. |
|
|
| . Limite inferiore del punto di inversione inferiore
Tipi di dati consentiti: Valore costante e variabile consentita. |
|
|
| . Limite superiore del punto di inversione superiore
Tipi di dati consentiti: Valore costante e variabile consentita. |
|
|
| Modalità eccentrica: Modalità pendolo: non utilizzata Tipi di dati consentiti: Valore costante e variabile consentita. |
|
|
| Modalità eccentrica: con questo input la pressa può essere spostata all'indietro. Questo è possibile fino al Modalità pendolo: non utilizzata |
|
|
| Modalità eccentrica: opzionale. Qui è possibile collegare una camma di inerzia. Viene eseguito un controllo per assicurarsi che la camma di inerzia sia impostata dopo il PMS e rimanga impostata mentre la pressa è ferma. La camma di inerzia può essere ripristinata solo dopo l'avvio del ciclo successivo. Modalità pendolo: non utilizzata |
|
|
| Modalità eccentrica: opzionale. Qui è possibile collegare una camma verso l'alto. Viene eseguito un controllo per assicurarsi che la camma sia impostata su PMI e ripristinata a 0°. Modalità pendolo: non utilizzata |
|
|
|
Solo uno dei È consentito solo un valore costante (nessuna variabile) |
|
|
|
Solo uno dei È consentito solo un valore costante (nessuna variabile) |
|
|
| Se la |
|
|
| Jitter ammesso (in ms) per la posizione ferma È consentito solo un valore costante (nessuna variabile) |
|
|
| Se la |
|
|
| Se la |
|
|
| Intervallo di tempo (in ms) per il rilevamento dello stato di fermo in cui la posizione può spostarsi solo del valore È consentito solo un valore costante (nessuna variabile) |
Nome | Tipo di dati | Valore iniziale | Descrizione, valori dei parametri |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
Dopo aver avviato il gruppo in cui è programmato il blocco funzione, |
|
|
| Funzionamento eccentrico: Modalità pendolo: a seconda della metà del movimento avviata, la potenza viene impostata nell'altra metà. L'uscita è impostata da |
|
|
| Funzionamento eccentrico: differenza tra Modalità pendolo: non utilizzata |
|
|
| Differenza tra la posizione sul fronte di discesa a |
|
|
|
|