Scheda: EtherCAT Master - Generale
La scheda serve per la configurazione delle impostazioni di base per il EtherCAT Master. Le impostazioni di base sono preimpostate dal file di descrizione del dispositivo.
Impostazioni dei parametri di configurazione
Importante
La modalità di configurazione automatica (Autoconfig master/slave L'opzione "Auto-configuration Mode" è selezionata di default ed è adatta per le applicazioni standard. Se la modalità non è selezionata, tutte le impostazioni di configurazione per il master e lo/gli slave devono essere eseguite manualmente. Per farlo, sono richieste competenze specifiche. L'opzione "Auto-configuration Mode" deve essere disattivata per configurare la comunicazione slave-slave.
Autoconfig master/slave |
Anche se questa opzione del master è selezionata, è possibile abilitare esplicitamente una modalità esperto per ogni singolo slave, che consente la modifica manuale della configurazione dei dati di processo generati automaticamente. |

Indirizzo di destinazione (MAC) | Indirizzo MAC del dispositivo nel EtherCAT rete che deve ricevere i telegrammi. . Opzioni
|
Indirizzo origine (MAC) | Indirizzo MAC del controller (sistema di destinazione) o nome di rete (nome dell'adattatore o PLC (sistema di destinazione)) |
Nome di rete | Nome o MAC della rete, a seconda di quale delle seguenti opzioni è selezionata: |
Seleziona rete per MAC |
|
Seleziona rete per nome |
|
Scansione | Esegue la scansione della rete alla ricerca degli ID MAC o dei nomi dei dispositivi di destinazione attualmente disponibili. |
Queste impostazioni vengono visualizzate solo quando Ridondanza è selezionata l'opzione. Qui vengono definiti i parametri del dispositivo aggiuntivo in base alla descrizione per Impostazioni EtherCAT NIC. |
Tempo di ciclo (µs) | Intervallo di tempo dopo il quale un nuovo telegramma di dati viene inviato sul bus. Quando il Orologio distribuito Quando la funzione è abilitata nello slave, il tempo di ciclo master qui specificato viene trasferito agli orologi slave . Di conseguenza, è possibile ottenere una sincronizzazione precisa dello scambio di dati. Ciò è particolarmente importante quando processi distribuiti nello spazio richiedono azioni simultanee. Un esempio di azione simultanea sono le applicazioni in cui più assi devono eseguire movimenti coordinati contemporaneamente. In questo modo è possibile ottenere una base temporale molto precisa, a livello di rete, con un jitter notevolmente inferiore a 1 microsecondo. |
Sync Offset | Parametro per impostare il tempo di ritardo tra la base dei tempi DC del EtherCAT Slave e l'avvio del ciclo del PLC. Il valore predefinito è 20%. Questo tempo è attivo contemporaneamente per tutti gli slaves con DC. Un offset del 20% significa che il timer interrompe il EtherCAT Slave avviene il 20% prima del successivo ciclo IEC. Ciò significa nel caso di
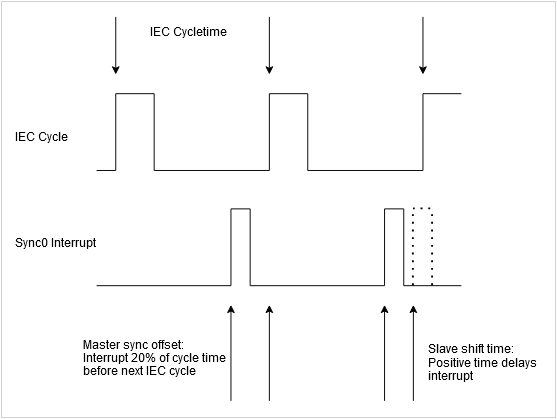 Se la DC è attiva sullo slave corrispondente, le impostazioni predefinite provengono dal rispettivo file ESI. Il produttore del dispositivo può definire qui ulteriori offset sotto forma di Tempo di spostamento per entrambi Sync 0 E Sync 1 interruzioni del timer. Quando l'impostazione esperta è abilitata sullo slave, questi tempi possono essere modificati manualmente. Tempo di spostamento è iscritto nel registro ImportanteÈ necessario impedire a tutti i costi che l'interruzione di sincronizzazione si verifichi in prossimità del ciclo IEC, perché altrimenti non possono esistere dati per un ciclo e i dispositivi entrano in errore di sincronizzazione. A tal fine, è necessario considerare sia gli offset del master sia quelli individuali di ogni slave . Con l'impostazione normale del 20% di offset per il master e dello 0% per gli slaves, il jitter del ciclo IEC e i ritardi della temporizzazione della trasmissione da parte del sistema possono essere al massimo pari a +80% e -20%. |
Monitoraggio finestra Sync |
|
Finestra Sync | Tempo per Monitoraggio finestra Sync Quando la sincronizzazione di tutti gli slaves avviene entro questa finestra temporale, la variabile |
Utilizza LRW invece di LWR/LRD |
|
Messaggi per task |
|
Riavvio automatico slave |
|
Questa funzionalità consente la comunicazione da uno strumento di configurazione del dispositivo esterno tramite il gateway della casella di posta al EtherCAT dispositivi. Non è necessario modificare il cablaggio. In generale, è possibile utilizzare tutti i protocolli di casella di posta specificati (CoE, FoE, VoE, SoE). | |
Attiva |
|
Indirizzo IP | Indirizzo IP per la connessione UDP. La porta UDP è impostata su 0x88a4. Opzioni
|
Queste impostazioni possono essere modificate solo quando il Autoconfig master/slave l'opzione è disattivata. Altrimenti, la modifica avviene automaticamente e non sono visibili qui. | |
Indirizzo immagine in | Primo indirizzo logico del primo slave per i dati di input |
Indirizzo immagine out | Primo indirizzo logico del primo slave per i dati di output |