Ottimizzazione delle prestazioni
In questa pagina, ti mostreremo come configurare un prodotto CODESYS Control SL basato su Linux per il tuo dispositivo e la tua applicazione in modo da ottenere le migliori prestazioni possibili.
Ti forniamo gli strumenti che puoi utilizzare per verificare e valutare lo stato attuale del tuo sistema.
Raccomandiamo la seguente procedura. Eseguire questi passaggi nell'ordine specificato. Non ha senso passare al passaggio successivo se quello attuale non è ottimizzato come dovrebbe essere.
Importante
Dopo ogni passaggio, verifica che l'ultima modifica non abbia influito negativamente sulle ottimizzazioni dei passaggi precedenti.
Dopo aver raggiunto le prestazioni desiderate con carico normale, è possibile opzionalmente eseguire un test con carico elevato stress-ng O iperf.
Puoi trovare maggiori informazioni sui seguenti siti web:
Controllo dell'hardware
Non utilizzare cache condivise per i core del processore del controller.
Se utilizzi bus di campo basati su Ethernet per il dispositivo di destinazione, utilizza un adattatore fisico per essi. Non utilizzate
Configurazione di Linux
Utilizza un kernel in tempo reale.
Per richieste in tempo reale, è necessario utilizzare il kernel RT preempt (https://wiki.linuxfoundation.org/realtime/documentation/start) per il tuo sistema Linux. Nel caso delle distribuzioni Debian e Ubuntu, troverai un kernel RT come pacchetto che puoi installare facilmente usando
aptcomando. Per ulteriori informazioni, consulta il manuale della tua distribuzione.Sui sistemi Debian
sudo apt-get install linux-image-rt-amd64Controlla quale kernel stai utilizzando con il file
uname -acomando. Per esempio.
Evita di utilizzare un gestore di finestre, un server GUI/X o simili sul tuo sistema.
L'utilizzo di questi strumenti potrebbe influire sulle capacità in tempo reale del sistema, con conseguente jitter elevato nell'applicazione IEC).
Test
Utilizzo degli "rt-tools":
Installazione di "rt-tools":
sudo apt install rt-testsAvvio del "test ciclico":
sudo cyclictest -p 99 -t -mIL
man cyclictestIl comando mostra più opzioni della riga di comando che puoi utilizzare per misurare meglio aspetti prestazionali più o specifici del tuo sistema.
Indipendentemente dal fatto che il valore sia determinato con cyclictest può essere considerato «buono» dipende dal tuo hardware. Se utilizzi un processore molto potente (ad esempio, Intel Core i7), dovresti avere al massimo un numero basso di 1 cifra. Se si utilizza un vecchio processore ARM, 100 potrebbe essere un
Opzioni di ottimizzazione
Importante
Dopo aver modificato ciascuna impostazione o combinazione di impostazioni, è necessario eseguire cyclictest programma per verificare l'efficacia delle modifiche.
Queste impostazioni non sono permanenti e pertanto devono essere ripristinate dopo l'avvio o il riavvio del sistema.
Avviso
Nella versione 4.21.0.0 e successive, CODESYS fornisce un comando shell PLC che emette direttamente la maggior parte di questi valori. A tale scopo, eseguite il system-creatertreport comando. Per maggiori dettagli sul comando, esegui system-creatertreport ?.
Disabilita la modalità di risparmio energetico della CPU.
Disabilita l'hyperthreading.
È possibile utilizzare il comando seguente per disabilitare l'hyperthreading (esempio):
echo off | sudo tee /sys/devices/system/cpu/smt/controlDisabilitare il ridimensionamento e la commutazione della frequenza della CPU il più possibile.
Ad esempio, impostare la frequenza minima e massima della CPU sullo stesso valore (fisso).
Disabilita il meccanismo di limitazione in tempo reale del kernel Linux, perché ciò può causare jitter sul tuo sistema.
Per ulteriori informazioni, vedere: The Linux Foundation: Scheduling — RT throttling
È possibile utilizzare il comando seguente per disattivare la limitazione in tempo reale (esempio):
echo -1 > /proc/sys/kernel/sched_rt_runtime_usControllare e modificare il regolatore di pianificazione/dimensionamento.
Controllare il regolatore di pianificazione/scalabilità utilizzato:
cat /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
Modificare il governatore di pianificazione/scalabilità utilizzato (come
root/admin) APerformance:echo "performance" > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor # set it for all available cores: echo "performance" > /sys/devices/system/cpu/cpu1/cpufreq/scaling_governor echo "performance" > /sys/devices/system/cpu/cpu2/cpufreq/scaling_governor echo "performance" > /sys/devices/system/cpu/cpu3/cpufreq/scaling_governor
Si noti che il regolatore di scala deve essere reimpostato ogni volta che si avvia il sistema. Puoi anche impostarlo tramite la configurazione del kernel.
IL
intel_pstatedriver del kernel può rendere più difficile l'impostazione corretta. Pertanto, dovresti usare il filecpufreq-infocomando per verificare la configurazione.Puoi anche utilizzare programmi come
cpu-freq-utils. Ciò potrebbe interferire con i driver Intel pstate. Questi driver normalmente richiedono un approccio diverso per impostare la frequenza della CPU.Per ulteriori informazioni, vedere: https://www.kernel.org/doc/Documentation/cpu-freq/governors.txt
disattivare
HyperVnel BIOS (se disponibile).
Configurazione del sistema runtime CODESYS
Crea un'applicazione di prova che descriva approssimativamente l'applicazione per la quale desideri ottimizzare il tuo sistema (in termini di risorse richieste, prestazioni richieste e dimensioni del progetto).
Puoi farlo in modo iterativo: prima crea un'approssimazione molto approssimativa e poi espandila per avvicinarti sempre di più all'applicazione reale.
Test
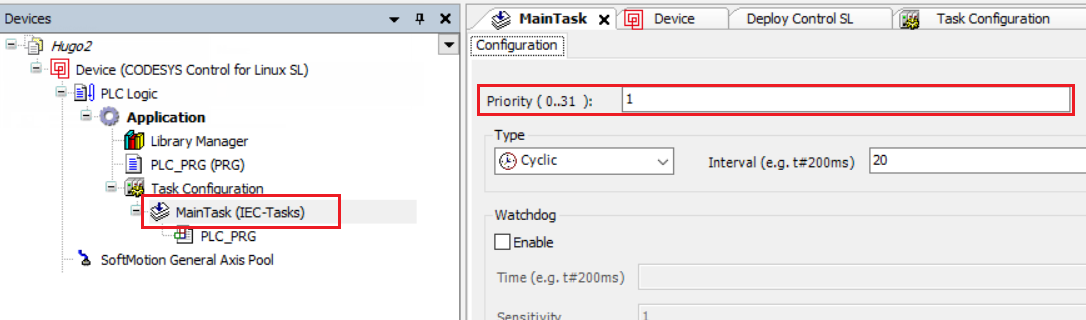
Quando l'applicazione è in esecuzione, controlla la configurazione dell'attività. Apri il Configurazione delle attività e seleziona il Tenere sotto controllo scheda.

minimo Jitter (μs)/max. Jitter (μs)
I valori dovrebbero avvicinarsi il più possibile ai valori determinati dal programma "cycletest". I dettagli sono descritti nella sezione Configurazione di Linux.
Per ulteriori informazioni su jitter e latenza, vedere: Definizioni di jitter e latenza
Per ulteriori informazioni sulla scheda Monitoraggio, vedere: Scheda: Monitoraggio
Tempo ciclo medio (μs)/max. Tempo di ciclo (μs) Tempo di ciclo (μs)
Il ciclo massimo non dovrebbe mai avvicinarsi al tempo di ciclo configurato. Ciò porta a problemi non appena il sistema sperimenta un carico elevato.
Mantenere sempre il tempo di ciclo il più breve possibile.
Opzioni di ottimizzazione
Importante
Dopo aver modificato ciascuna impostazione o combinazione di impostazioni, è necessario eseguire cyclictest programma per verificare l'efficacia delle modifiche.
Suddividi le attività di lunga durata in più attività più piccole.
Durante l'esecuzione, il tempo di ciclo massimo del task con la priorità più alta non dovrebbe mai raggiungere il tempo di ciclo configurato. Se non è possibile evitarlo, è necessario aumentare il tempo di ciclo progettato per garantire tempi di esecuzione coerenti.
All'avvio dei sistemi bus di campo (ad esempio EtherCAT o PROFINET) i cicli di avvio possono comportare un carico leggermente maggiore della CPU. In questo caso ha senso monitorare il carico della CPU subito dopo l'avvio dell'applicazione.
Non è possibile modificare le seguenti opzioni CODESYS Virtual Control SL, ma devono essere configurati sull'host:
Imposta il valore per
DisableCpuDmaLatencya 1:[SysCpuHandling] Linux.DisableCpuDmaLatency=1
Tieni presente che questa è l'impostazione predefinita a partire dalla versione runtime 4.11.0.0.
Per verificare la versione del runtime, fare clic su Extra → Aggiorna Linux → Sistema → Informazioni di sistema.
Controllare se il kernel in tempo reale viene realmente utilizzato o meno.
A partire dalla versione 4.11.0.0 è possibile utilizzare il comando della shell PLC
rt-get kernelinfoper verificare questo.Se hai una versione precedente, puoi testarla direttamente sulla riga di comando con
uname -acomando.Se il kernel in tempo reale non viene utilizzato, è necessario avviare l'ottimizzazione dall'inizio.
Configurazione dell'applicazione IEC
Questa sezione si riferisce alla tua applicazione effettiva.
Test
È possibile utilizzare i test del passaggio precedente Configurazione del sistema runtime CODESYS per testare la tua applicazione IEC.
Opzioni di ottimizzazione
Importante
Dopo aver modificato ciascuna impostazione o combinazione di impostazioni, è necessario eseguire il programma "ciclicotest" per verificare l'efficacia delle modifiche.
Puoi usare il Multicore caratteristica in CODESYS.
Determina le priorità corrette per i tuoi compiti. I compiti importanti dovrebbero avere una priorità più alta.
Tabella 6. Mappatura delle priorità delle attività IEC e delle priorità dei thread Linux:Priorità del compito IEC
Priorità di runtime
Priorità Linux
--
0
88 (SCHED_FIFO)
--
31
57 (SCHED_FIFO)
0 (massima priorità in tempo reale)
32
56 (SCHED_FIFO)
15 (priorità in tempo reale più bassa)
47
41 (SCHED_FIFO)
16 (priorità non in tempo reale)
48
0 (SCHED_OTHER)
31 (priorità non in tempo reale)
63
0 (SCHED_OTHER)
--
64
0 (SCHED_OTHER)
--
255
(SCHED_IDLE)
Avviso
Su un sistema Linux convenzionale, la maggior parte degli interrupt (IRQ) e dei kernel worker hanno la priorità Linux 50. L'uso di priorità (con carico elevato) superiori a tale valore può far sì che le funzioni di sistema (rete/storage) non funzionino
È possibile configurare la priorità di un'attività nella rispettiva configurazione dell'attività.
Se non ottieni le prestazioni desiderate dopo tutti i passaggi qui menzionati, puoi consultare le seguenti sezioni:
Informazioni specifiche del bus di campo
Test
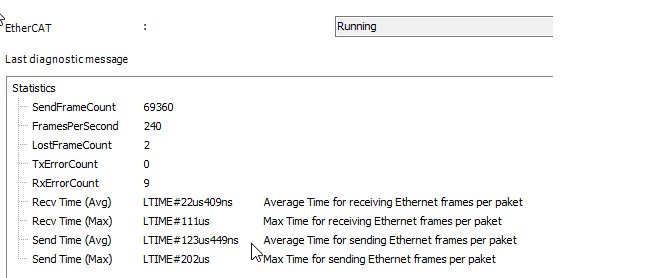
Controlla il
Send Time/Recv Timevalori nella pagina di stato EtherCAT.Una CPU x64 con processore Intel Core i7 e un buon adattatore dovrebbe avere meno di 10μs.
I processori ARM con chip integrato avranno ~50μs o più.
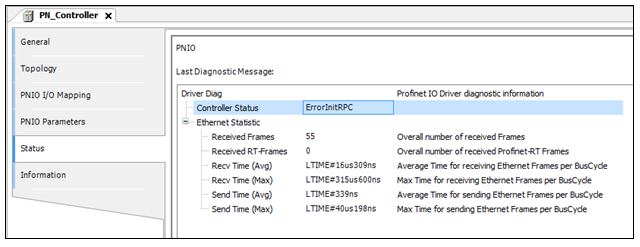
Controlla il
Send Time/Recv Timevalori nella pagina di stato PROFINET.Una CPU x64 con processore Intel Core i7 e un buon adattatore dovrebbe avere meno di 10μs.
I processori ARM con chip integrato avranno ~50μs o più.
Opzioni di ottimizzazione
Per ordinare le priorità e gli IRQ richiesti, è possibile utilizzare i comandi della shell PLC
irq-listEirq-set-prio.Questi comandi utilizzano le normali priorità Linux e non le priorità IEC.
Questa ottimizzazione non è possibile in CODESYS Virtual Control SL, ma piuttosto sul sistema host.
Utilizzare un adattatore di rete separato per i dispositivi.
Per ulteriori informazioni, vedere:
[Per esperti] – Strumenti e argomenti aggiuntivi
Gli strumenti e le opzioni descritti in questa sezione sono destinati esclusivamente agli utenti esperti e richiedono una ricerca personale, poiché le misure da adottare dipendono fortemente dal sistema in questione. Pertanto non siamo in grado di offrirvi soluzioni specifiche.
KernelShark/traccia del kernel
Questo è il programma da scegliere se ritieni che la causa dei tuoi problemi di prestazioni sia la pianificazione. Con l'aiuto della "traccia del kernel", puoi vedere se la tua attività viene interrotta da un'altra attività, da un altro servizio o da un'interruzione.
trace-cmd record -p functionÈ possibile utilizzare KernelShark per esaminare il file generato
trace.datfile.
In generale, i problemi di pianificazione possono essere suddivisi in due categorie:
Sostituzione/prelazione
Se l'interruzione o l'attività che impedisce l'esecuzione non è necessaria, disabilitala.
Aumenta la priorità del tuo compito o riduci la priorità degli altri.
Passa a un core della CPU diverso.
Importante
Verificare l'efficacia delle modifiche utilizzando i programmi descritti nel capitolo precedente.
Tempo di esecuzione
Vedi sotto: "Traccia delle funzioni del kernel"
Traccia della funzione del kernel
Se determini che il tempo di esecuzione del codice è troppo elevato, puoi utilizzare questo strumento per individuare il problema.
Se la funzione con un tempo di esecuzione troppo elevato è nel tuo codice, devi ottimizzarla.
Se nel kernel è presente una funzione con un tempo di esecuzione troppo elevato, è possibile provare a ottenere la funzionalità desiderata con un'altra funzione del kernel. In alternativa, potresti anche passare i parametri di configurazione al driver del kernel per ridurre il tempo di esecuzione.
Se nessuna di queste opzioni risolve il problema, probabilmente dovrai utilizzare hardware più potente.
Osserva i seguenti punti e verifica se sono o meno lo strumento corretto per raggiungere i tuoi obiettivi di performance:
PREEMPT_FULL
isolcpu
rcu_nocbs
rcu_nocb_poll
nosoftlockup
disabilitazione del bilanciamento irq
kernel.sched_rt_runtime_us