Utilisation d'axes supplémentaires en robotique
Le Robotics_AdditionalAxes.project Un exemple de projet montre comment des axes supplémentaires sont configurés et utilisés en robotique. Les axes supplémentaires sont des axes qui sont déplacés de manière synchrone avec les mouvements coordonnés du robot
Le projet se trouve dans le répertoire d'installation de CODESYS en dessous ..\CODESYS SoftMotion\Examples.
Structure de la demande
Le groupe d'axes est configuré dans Groupe Axis objet. Un robot SCARA à 3 axes (deux axes rotatifs et un axe Z linéaire) est utilisé
Deux axes supplémentaires ont également été ajoutés ci-dessous. Axes supplémentaires et relié aux deux axes DriveAdd1 et DriveAdd2.
Le PLC_PRG Le programme contient une machine à états simple pour le flux du programme. Tout d'abord, le groupe d'axes est activé dans l'état 0, puis un mouvement PTP pour se positionner (X=50, Y=50) est effectué. Ceci est ensuite mélangé dans un mouvement linéaire pour positionner (X=50, Y=-50).
Pour le premier mouvement du robot, un mouvement d'axe supplémentaire relatif avec la distance (10, 20) est commandé. Pour le second mouvement du robot, la distance de l'axe supplémentaire est (-10, -20).
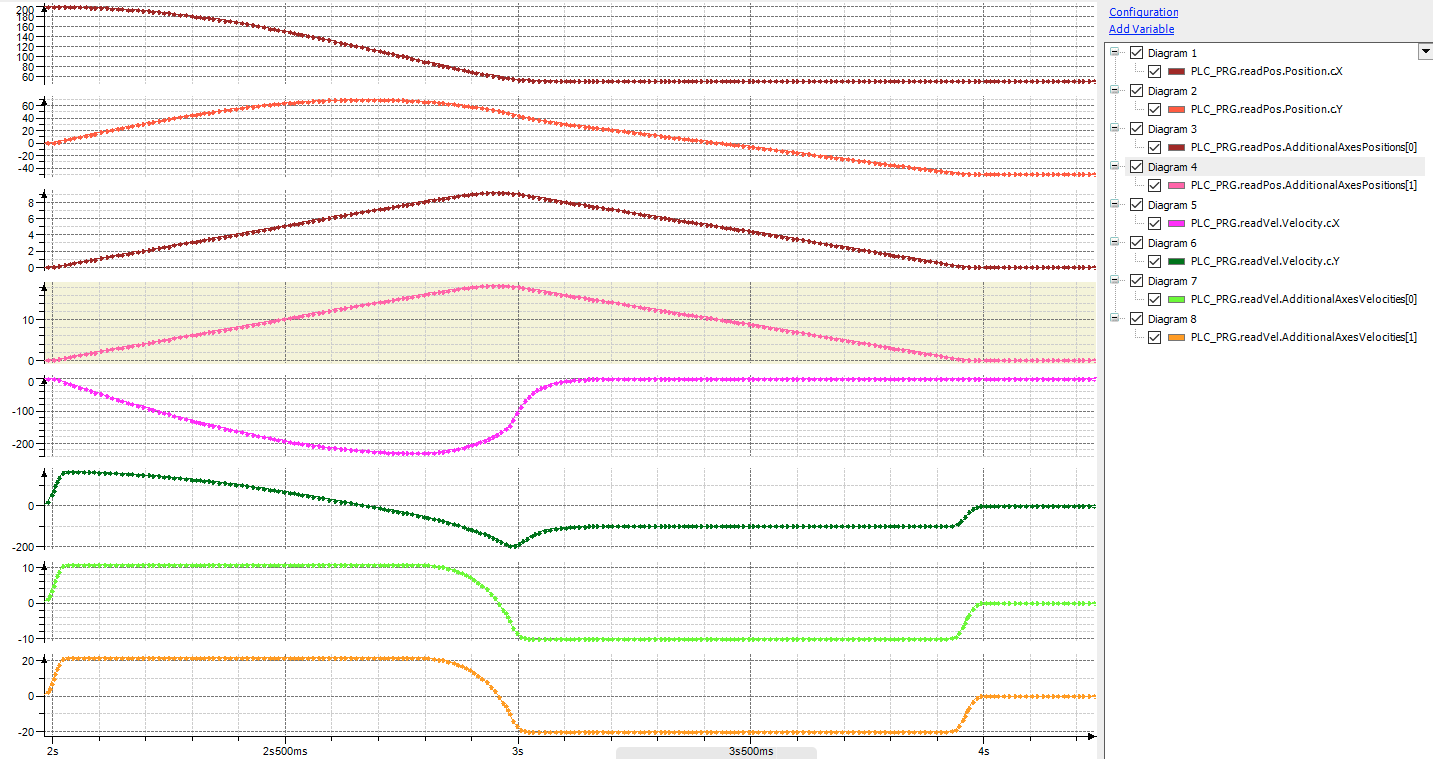
Le MC_GroupReadActualPosition et MC_GroupReadActualVelocity des blocs fonctionnels sont utilisés pour lire la position et la vitesse de la cinématique et des axes supplémentaires.
Mise en service
Créez l'application et téléchargez-la sur une manette.
Ouvrez la trace et téléchargez-la sur le contrôleur.
Démarrez l'application.
Vous pouvez suivre le mouvement des coordonnées X et Y et des deux axes supplémentaires dans le tracé.