Systèmes de coordonnées
CODESYS SoftMotion Robotics fournit différents systèmes de coordonnées dans lesquels les mouvements peuvent être commandés.
Système de coordonnées des axes (ACS)
Système de coordonnées d'outils (TCS)
Système de coordonnées mondial (WCS)
Système de coordonnées de la machine (MCS)
Système de coordonnées du produit (PCS_1, PCS_2)
Système de coordonnées | Descriptif |
|---|---|
Système de coordonnées des axes (ACS) | Le système de coordonnées des axes définit un système de coordonnées dans l'espace des axes où chaque axe du robot couvre une dimension. Il est ainsi possible de spécifier une position pour chaque axe du robot. |
Système de coordonnées d'outils (TCS) | Le système de coordonnées de l'outil est un système de coordonnées cartésien situé sur le point central de l'outil (TCP) de la cinématique. Sa position et son orientation dépendent de la position du robot. |
Système de coordonnées mondial (WCS) | Le système de coordonnées mondial est un système de coordonnées cartésien statique qui constitue la base de tous les systèmes de coordonnées suivants. Ils sont définis par rapport au système de coordonnées mondial. |
Système de coordonnées de la machine (MCS) | Le système de coordonnées de la machine est un système de coordonnées cartésien statique. La position et l'orientation du MCS par rapport au robot physique sont définies par la cinématique Le MC_SetCoordinateTransform Un bloc fonctionnel peut être utilisé pour déplacer le système de coordonnées par rapport au système de coordonnées mondial (WCS). |
Système de coordonnées du produit (PCS_1, PCS_2) | Les systèmes de coordonnées des produits sont des systèmes de coordonnées cartésiens qui peuvent être définis par l'utilisateur. Ils sont exprimés par rapport au système de coordonnées mondial (WCS) et peuvent être statiques ou dynamiques . Statique
. Dynamique Les blocs fonctionnels suivants peuvent être utilisés pour définir des systèmes de coordonnées dynamiques : |
Position initiale et orientation des systèmes de coordonnées
La cinématique du robot détermine la position initiale et l'orientation des systèmes de coordonnées. Ceci est décrit dans la documentation de la cinématique
Position et orientation du système de coordonnées de la machine (MCS) par rapport au robot physique
Position et orientation du point central de l'outil (TCP) par rapport au MCS et donc au système de coordonnées de l'outil (TCS)
Position zéro du robot ainsi que sens de rotation ou de mouvement des différents axes
Le système de coordonnées mondial (WCS) et les systèmes de coordonnées du produit (PCS_1, PCS_2) ne sont pas initialement décalés et sont identiques au système de coordonnées de la machine.
Robots et pièces multiples
La position et l'orientation des systèmes de coordonnées sont définies pour chaque robot. Lorsque plusieurs robots travaillent ensemble, il peut être utile de définir le système de coordonnées mondial (WCS) comme un système de coordonnées de base commun. Sur la base de ce système de coordonnées, les systèmes de coordonnées des machines (MCS) et les systèmes de coordonnées des produits (PCS_1, PCS_2) des robots individuels peuvent être
Exemple
Exemple d'utilisation d'un robot à deux joints rotatifs (a0 et a1)
Cinématique
La cinématique définit la position zéro du robot (comme indiqué ci-dessous). L'origine du système de coordonnées de la machine se trouve sur l'axe de rotation de l'axe a0. L'axe X pointe dans la direction du premier maillon lorsque la position du premier a0 est 0. L'axe Y pointe dans la direction du premier maillon lorsque la position du premier a0 est +90°. La rotation dans le sens antihoraire correspond au sens de rotation positif. Le point central de l'outil (TCP) se trouve à l'extrémité de la deuxième liaison du robot (comme indiqué ci-dessous) et constitue l'origine du TCS. Le TCS est aligné de telle sorte que l'axe X longe le second
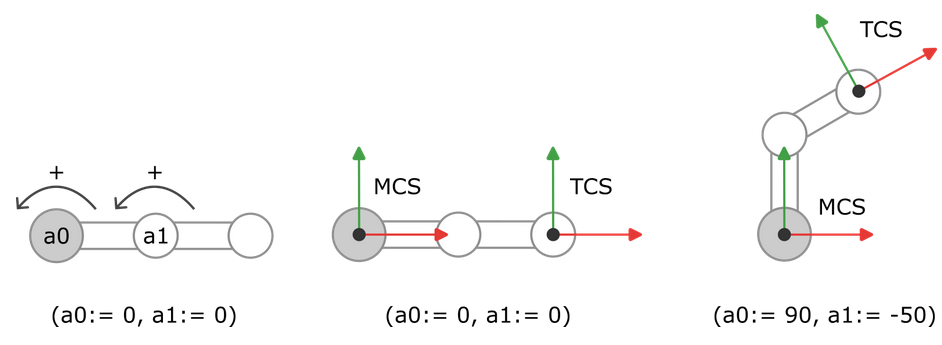
Système de coordonnées des axes (ACS)
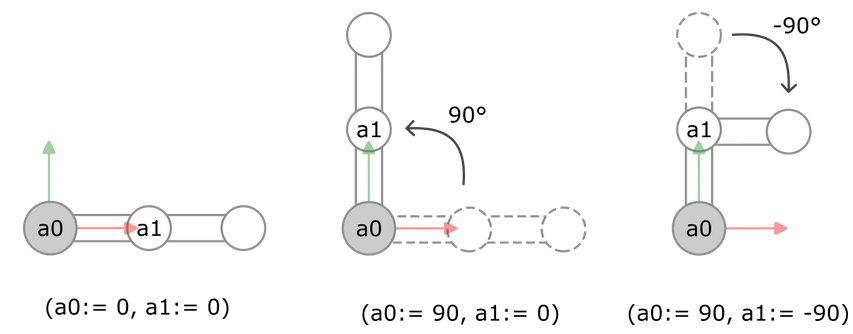
La cinématique a spécifié la position zéro du robot et le sens de rotation des différents axes. Parce que le robot est composé de deux axes a0 et a1, nous pouvons spécifier les positions des axes a0 et a1 dans l'ACS.
Dans la première image, nous indiquons la position (a0:= 0, a1:= 0). Cela correspond à la position zéro du robot.
Dans la deuxième image, nous indiquons la position (a0:= 90, a1:= 0). En partant de la position zéro, le premier axe a0 est pivoté 90° dans le sens de rotation positif. Le deuxième axe a1 reste en position zéro.
Dans la troisième image, nous indiquons la position (a0:= 90, a1:= -90). En partant de la position zéro, le premier axe a0 est pivoté 90° dans le sens de rotation positif (comme dans la deuxième image). De plus, le deuxième axe a1 est pivoté 90° dans le sens négatif de la rotation.
Système de coordonnées d'outils (TCS)
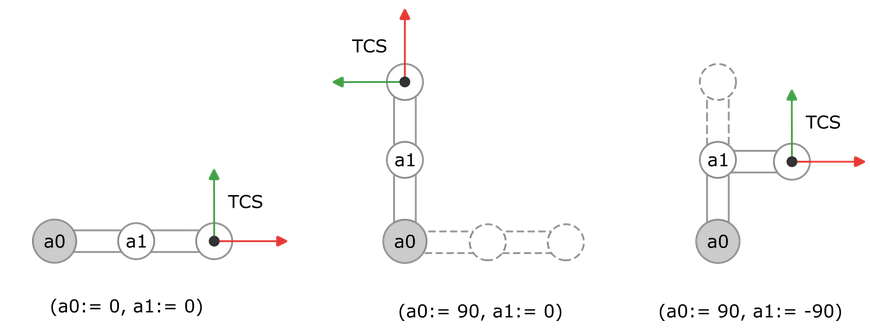
La cinématique définit la position et l'orientation du TCP et du TCS. En fonction de la façon dont nous déplaçons le robot, la position et l'orientation du TCS changent également
Système de coordonnées mondial (WCS), système de coordonnées machine (MCS) et système de coordonnées produit (PCS_1, PCS_2)
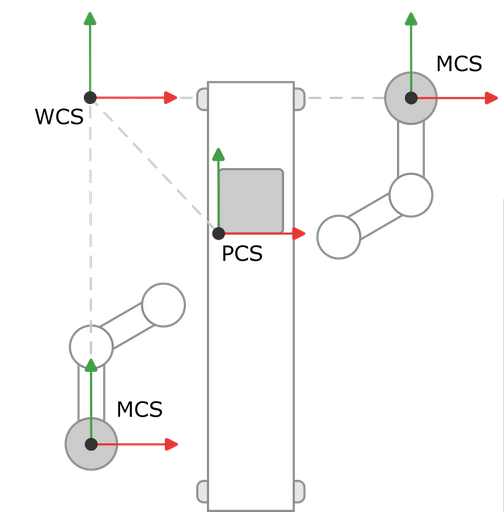
Dans un hall de production, deux robots se tiennent à gauche et à droite d'un tapis roulant. Les robots doivent traiter les produits sur la bande transporteuse. Nous définissons un système de coordonnées mondial commun et le plaçons dans le coin supérieur gauche de notre hall de production. À partir de ce système de coordonnées, nous déterminons la distance et la rotation par rapport aux systèmes de coordonnées de la machine et au produit et nous décalons les systèmes de coordonnées en conséquence.
Dans l'exemple, tous les systèmes de coordonnées sont alignés de la même manière, il suffit de les déplacer. Le système de coordonnées machine du robot gauche est décalé dans la direction Y, le système de coordonnées machine du robot droit est décalé dans la direction X et le système de coordonnées du produit est décalé à la fois dans la direction X et dans la direction