Configuration et mise en service
CODESYS SoftMotion Light configuration dans CODESYS
Ajoutez un dispositif d'entraînement à l'arborescence des dispositifs, par exemple votre propre dispositif EtherCAT Slave ou CAN Slave.
En dessous, insérez un CODESYS SoftMotion Light axe. Puis clique .
Ouvrez l'appareil EtherCAT ou CAN ajouté dans l'éditeur (Accélnet module dans l'exemple).
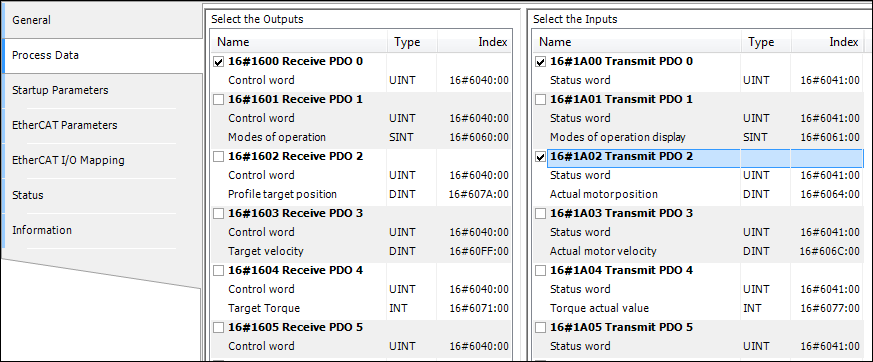
Configurez les données de processus (PDO) de l'appareil EtherCAT ou de l'appareil CAN.
Vous devez configurer les données de processus de manière à ce que le "Mot d'état" et éventuellement le "Mot de contrôle" soient transmis en cas de modification. Si le mot de contrôle n'est pas transféré via PDO, il sera transféré via SDO dès qu'il changera. Pour les axes modulaires, vous devez transmettre la position actuelle lors de l'utilisation
MC_MoveAbsolute_SMLouMC_MoveRelative_SML. Vous pouvez transmettre la position actuelle de manière synchrone ou lorsqu'un changement se produit. Si la position est transmise lorsqu'un changement se produit, vous devez alors configurer un Temps d'inhibition pour éviter que la transmission ne se produise trop souvent. Il n'est pas nécessaire de transmettre d'autres objets via PDO.Exemple de configuration PDO dans l'éditeur d'appareil EtherCAT :
Passez à la Mappage d'E/S EtherCAT languette. Dans Variables de mise à jour, sélectionnez le Active 2 (toujours en tâche de cycle de bus) option.
Passez à la Général languette.
Pour les variateurs EtherCAT, il n'est pas nécessaire d'utiliser des horloges distribuées. Cependant, certains lecteurs peuvent en avoir besoin.
Astuce
Pour les lecteurs CAN, vous devez activer le rythme cardiaque. Alternativement, vous pouvez activer le télégramme SYNC si la position actuelle est transmise. Dans ce cas, le rythme cardiaque n'est pas nécessaire. Une troisième option consiste à utiliser le node guarding. La configuration correspondante se fait sur le Général de l'esclave CANopen.
Important
Si ni télégramme SYNC, ni heartbeat, ni Node Guarding ne sont actifs, alors ne peut pas déterminer si le lecteur est ou non dans l'état "opérationnel".
Ouvrez le CODESYS SoftMotion Light axe dans l'éditeur (SML_Drive_GenericDSP402 dans l'exemple).
La configuration est similaire à un CODESYS SoftMotion Light l'axe (voir la description de l'éditeur d'appareil SoftMotion).
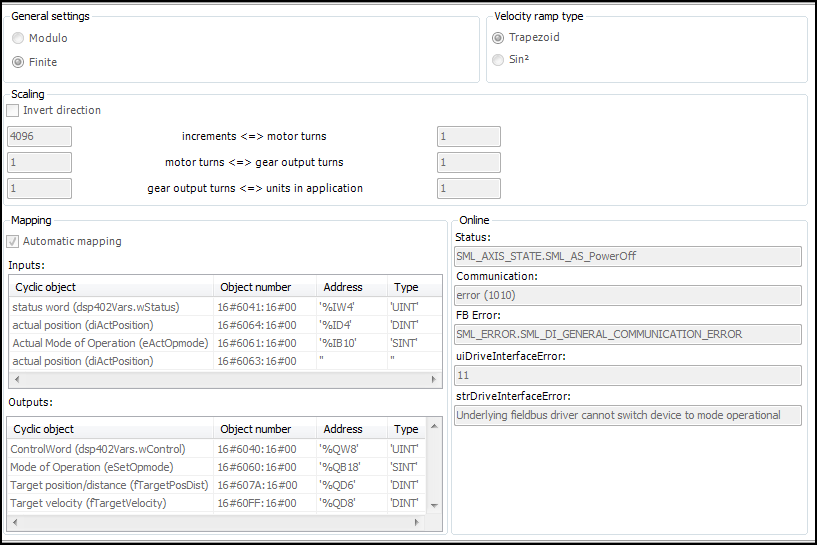
Définissez les paramètres suivants sur le SoftMotionLight languette:
Réglages généraux
Modulo: Valeur modulo [u] (période modulo) activée.
Fini
Type de rampe de vitesse: Détermine le profil de vélocité.
Trapézoïdal: Conduit à un profil de vitesse trapézoïdal (avec une accélération constante dans chaque segment)
Sin²: Si supporté par le variateur, ce réglage conduit à un profil de vitesse décrit par la fonction sin² (avec une courbe d'accélération constante).
Mise à l'échelle: Définissez les incréments sur les unités dans l'application.
Vous définissez ici le facteur de conversion des valeurs de position entières (Incréments) en unités techniques (Unités en application). Les valeurs de position ont été reçues par le variateur et envoyées à l'appareil. L'unité technique est utilisée par le programme IEC. En réglant les autres paramètres (Rotations du moteur, Rotations d'entrée de vitesse, Rotations de sortie des engrenages), vous pouvez également inclure une boîte de vitesses.
Inverser le sens: Le moteur reçoit les valeurs prédéfinies avec des signes inversés et tourne donc dans le sens opposé.
Passez à la Mappage d'E/S EtherCAT de l'EtherCAT Slave. Vérifiez le mappage généré automatiquement de CODESYS SoftMotion Light paramètres pour les adresses dans la mémoire de processus. Dans certains cas exceptionnels, cette cartographie peut être adaptée manuellement.
Si Cartographie automatique est activé, les entrées et les sorties de l'esclave EtherCAT sont mappées automatiquement.
Mise en service
En mode en ligne, des informations sur l'état, la communication et les erreurs sont affichées sur le SoftMotionLight onglet du lecteur.
Pour assister la mise en service, vous pouvez utiliser le SML_StartupDrive bloc fonction (SML_Basic.library) et le VISU_SML_StartupDrive modèle de visualisation (insérer dans un élément de cadre d'une visualisation). De cette façon, vous pouvez facilement accéder à la plupart des CODESYS SoftMotion Light fonctions, telles que Power, Home, MoveAbsolute, MoveRelative, et MoveVelocity, ainsi que les paramètres de lecture et d'écriture.