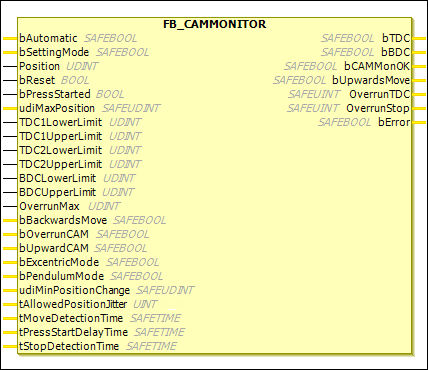
FB_CAMMONITOR
Description Bloc Fonctionnel
Le FB_CAMMONITOR bloc fonctionnel est utilisé pour implémenter un groupe de cames électroniques. En plus du mode excentrique, le mode pendule est également pris en charge.
Mode excentrique :
En mode excentrique, un seul sens de rotation est autorisé.
Un contrôle est effectué pour s'assurer que la position s'arrête après un cycle au plus tard après le point d'inversion supérieur (PMH : Point Mort Haut) plus dépassement maximum (
OverrunMax).OverrunTDCproduit le dépassement actuel ou la position actuelle après le PMH.Le point d'inversion inférieur (BDC : Point Mort Bas) est spécifié avec une limite inférieure et supérieure. Une fois le BDC dépassé, la presse est en mouvement ascendant. Ces informations sont sorties au
bUpwardsMovesortir.Si la presse s'arrête sans avoir atteint ou dépassé à nouveau le PMH ou si le sens de rotation est inversé, le
bCamMonOKla sortie est immédiatement réglée surFALSE.Une fois l'arrêt atteint, un nouveau cycle n'est autorisé qu'après détection d'un front descendant au niveau du
bResetsaisir.Le
bBackwardsMoveL'entrée est utilisée pour notifier au bloc fonction qu'un mouvement vers l'arrière de la presse est autorisé. Ceci n'est autorisé que si la position se situe entreTDC1UpperLimitetBDCLowerLimit. Le mouvement vers l'arrière se termine lorsqueTDC1UpperLimitest atteint.En mode excentrique, une came ascendante peut être connectée au
bUpwardCAMentrée et une came de dépassement peuvent être connectées à l'entréebOverrunCAMsaisir. Si labUpwardCAMest active, puis un contrôle est effectué pour vérifier que la came ascendante est réglée après le PMB et réinitialisée à 0°. Si labOverrunCAMest active, puis un contrôle est effectué pour s'assurer que la came de dépassement est positionnée aprèsTDC1LowerLimitet reste réglé pendant que la presse est à l'arrêt. La came de dépassement ne peut être réinitialisée qu'après le démarrage du cycle suivant. Un mouvement vers l'arrière de la presse n'est autorisé que si lebUpwardCAMetbOverrunCAMles entrées sontFALSE. Le mouvement vers l'arrière se termine lorsque lebOverrunCAMl'entrée devientTRUE.Mode pendule :
Les deux sens de rotation sont autorisés en mode pendule. Deux points d'inversion supérieurs (PMH : Point Mort Haut) sont précisés ici.
Étant donné que la courbe avec laquelle la presse est censée être entraînée peut ou doit être modifiée pour chaque produit, la plage maximale de la course du pendule est fixée pour les limites des deux PMH.
Un contrôle est effectué pour s'assurer que
TDC1etTDC2ne sont jamais dépassés. Si cela se produit quand même, alors lebCamMonOKla sortie est réglée surFALSE. En début de cycle (front descendant aubResetentrée), la presse peut démarrer avec n'importe quel mouvement (pulsatoire, inverse, etc.) jusqu'à ce que le PMB soit atteint. Après cela, seul le mouvement ascendant est autorisé. Le mouvement ascendant est émis sous forme de signal aubUpwardsMovesortir.Le point d'inversion inférieur (BDC : Point Mort Bas) est spécifié avec une limite inférieure et supérieure.
Un redémarrage est autorisé via le
bResetsaisir. Si la presse se déplace vers le bas sans qu'un front descendant ne soit détecté au niveaubResetentrée, puis il est arrêté immédiatement en réglant lebCamMonOKsortie versFALSE.L'optionnel
bUpwardCAMetbOverrunCAMles entrées pour connecter une came montante et une came de dépassement ne sont pas prises en charge en mode pendule. S'ils sont actifs par erreur, une erreur est générée.
FB_CAMMONITOR
Le FB_CAMMONITOR fournit à l'utilisateur un module d'évaluation sûr qui peut sortir les cames en toute sécurité (bTDC, bBDC, et bUpwardsMove) selon les valeurs fixes définies et en fonction de la position actuelle.
Sortie du bloc fonctionnel : bUpwardsMove
La sortie bUpwardsMove fournit à l'utilisateur l'information que la presse est en mouvement ascendant après avoir dépassé le BDC. Ce signal peut être utilisé par exemple pour désactiver des barrières immatérielles ou pour transférer des commandes de contrôle à la presse.
Détection de position de la presse
La détection de position doit être mise en œuvre conformément au SIL ou au niveau de performance requis. L'utilisateur ou le constructeur de la machine doit prouver que cette condition est remplie.
La valeur de position doit être vérifiée de manière fiable, par exemple à partir de plusieurs valeurs analogiques, ou elle doit être mise à disposition du bloc fonctionnel d'une autre manière sûre. La première peut être mise en œuvre, par exemple, au moyen du COMPARE bloc fonctionnel. De plus, le bPressStarted l’entrée peut être utilisée pour générer une attente. Dans ce cas, la demande d'un mouvement est communiquée au bloc fonction. Le bloc fonctionnel surveille ensuite qu'un changement de position se produise également dans les limites des paramètres définis.
Mode excentrique / mode pendule
Pour le mode excentrique, le bExcentricMode l'entrée est définie et le TDC2UpperLimit et TDC2LowerLimit les entrées doivent être inactives ou 0.
Le bPendulumMode l'entrée est réglée pour le mode pendule et le TDC2UpperLimit et TDC2LowerLimit les entrées doivent être actives et différentes de 0.
EL6900
Le FB_CAMMONITOR Le bloc fonctionnel n’est pas pris en charge par le EL6900.
Nom | Type de données | Valeur initiale | Description, valeurs des paramètres |
|---|---|---|---|
|
|
|
|
|
|
| Transfert de paramètres en mode configuration Si l'entrée est définie sur |
|
|
| Position d'appui : La valeur de position doit être vérifiée de manière fiable, par exemple à partir de plusieurs valeurs analogiques, ou elle doit être mise à disposition du bloc fonctionnel d'une autre manière sûre en fonction du SIL ou du niveau de performance requis. Types de données autorisés : |
|
|
| Entrée de réinitialisation : un front descendant doit être détecté à l'entrée |
|
|
| Si l'entrée est active, alors un mouvement ou un changement de position est attendu pour un 1 logique à l'entrée. Pour ce faire, le |
|
|
| Valeur de position maximale autorisée lors d'un mouvement de 360° de la presse. Seule une valeur constante est autorisée (pas de variable). |
|
|
| Mode excentrique : Limite inférieure du point d'inversion supérieur (PMH : Point Mort Haut). Celui-ci est situé à gauche du point d'inversion supérieur. Mode pendule : Limite inférieure du point d'inversion supérieur dans la moitié gauche de la presse. La valeur doit être supérieure au point d'inversion inférieur et inférieure à Types de données autorisés : Valeur constante et variable autorisées. |
|
|
| Mode excentrique : Limite supérieure du point d'inversion supérieur. Celui-ci est situé à droite du point d'inversion supérieur. Mode pendule : Limite supérieure du point d'inversion supérieur dans la moitié gauche de la presse. La valeur doit être supérieure à TDC1LowerLimit et inférieure à udiMaxPosition. Types de données autorisés : Valeur constante et variable autorisées. |
|
|
| Mode excentrique : Non utilisé Mode pendule : Limite inférieure du point d'inversion supérieur dans la moitié droite de la presse. La valeur doit être supérieure à Types de données autorisés : Valeur constante et variable autorisées. |
|
|
| Mode excentrique : Non utilisé Mode pendule : Limite supérieure du point d'inversion supérieur dans la moitié droite de la presse. La valeur doit être supérieure à 0 et inférieure à Types de données autorisés : Valeur constante et variable autorisées. |
|
|
| . Limite inférieure du point d'inversion inférieur
Types de données autorisés : Valeur constante et variable autorisées. |
|
|
| . Limite supérieure du point d'inversion supérieur
Types de données autorisés : Valeur constante et variable autorisées. |
|
|
| Mode excentrique : Mode pendule : Non utilisé Types de données autorisés : Valeur constante et variable autorisées. |
|
|
| Mode excentrique : Avec cette entrée, la presse peut être déplacée vers l'arrière. Ceci est possible jusqu'à Mode pendule : Non utilisé |
|
|
| Mode excentrique : facultatif. Une came de dépassement peut être connectée ici. Un contrôle est effectué pour s'assurer que la came de dépassement est réglée après le PMH et qu'elle reste réglée pendant que la presse est à l'arrêt. La came de dépassement ne peut être réinitialisée qu'après le démarrage du cycle suivant. Mode pendule : Non utilisé |
|
|
| Mode excentrique : facultatif. Une came ascendante peut être connectée ici. Un contrôle est effectué pour s'assurer que la came est réglée au PMB et réinitialisée à 0°. Mode pendule : Non utilisé |
|
|
|
Un seul des Seule une valeur constante est autorisée (pas de variable) |
|
|
|
Un seul des Seule une valeur constante est autorisée (pas de variable) |
|
|
| Si la |
|
|
| Gigue admissible (en ms) pour la position à l'arrêt Seule une valeur constante est autorisée (pas de variable) |
|
|
| Si la |
|
|
| Si la |
|
|
| Période (en ms) pour la détection d'arrêt où la position ne peut se déplacer que de la valeur Seule une valeur constante est autorisée (pas de variable) |
Nom | Type de données | Valeur initiale | Description, valeurs des paramètres |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
Après avoir démarré le groupe dans lequel le bloc fonction est programmé, |
|
|
| Fonctionnement excentrique : Mode pendule : En fonction de la moitié du mouvement qui a démarré, la sortie est réglée dans l'autre moitié. La sortie est définie à partir de |
|
|
| Fonctionnement excentrique : Différence entre Mode pendule : Non utilisé |
|
|
| Différence entre la position sur le front descendant à |
|
|
|
|