Onglet : Canal serveur Modbus
Vous utilisez cet onglet pour définir les canaux du serveur.
Chaque canal représente une seule requête Modbus.
Ajouter un canal | Ouvre le Canal Modbus Boîte de dialogue. Vous pouvez ici créer de nouveaux canaux pour le serveur Modbus actuel. Dans le fichier de description de l'appareil du serveur Modbus, vous pouvez prédéfinir des descriptions pour des registres Modbus individuels ou des canaux entiers. |
Dialogue : Canal Modbus
Nom | Une chaîne contenant le nom du canal |
Type d'accès |
|
Déclencheur |
|
Temps de cycle (ms) | Pour le Déclencheur = CYCLIQUE: Intervalle de demande Remarque : l'intervalle de demande doit être égal ou multiple du temps de cycle de l'application. |
Commentaire | Description de la chaîne |
Décalage | Adresse de départ où la lecture doit commencer (plage de valeurs 0–65535) |
Longueur | Nombre de registres à lire (pour l'accès aux mots) ou nombre d'entrées discrètes à lire (pour l'accès aux bits) |
Gestion d'erreurs | Définit ce qui doit arriver aux données en cas d'erreur de communication
|
Décalage | Numéro du registre dans lequel écrire (plage de valeurs 0–65535) |
Longueur | Nombre de registres à écrire (= mots) La plage de valeurs du paramètre dépend du code de fonction. |
Lecture de bobines et d'entrées discrètes / Écriture de bobines dans la mémoire à registres superposés
Le CODESYS Le pilote d'E/S MODBUS permet la lecture de bobines et d'entrées discrètes, ainsi que l'écriture de bobines dans la mémoire de registres superposés (le Zones de bits discrets (case non cochée). Dans ce cas, les 8 premiers bits lus (%IB0) ou écrits s'alignent sur l'octet de poids fort du registre correspondant. Les 8 bits suivants lus (%IB1) s'alignent sur l'octet de poids faible du registre correspondant (LSB en premier).
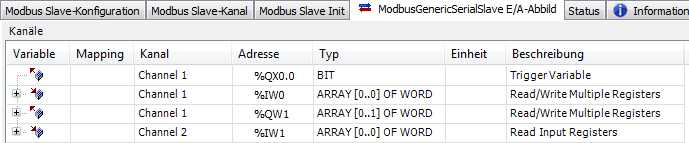
Dans l'exemple suivant, la première ligne définit une opération combinée de lecture/écriture (code de fonction 23). Elle lit un mot du registre de retenue avec un décalage. 16#0001 et écrit deux mots dans le registre avec décalage 16#0003. L'opération est effectuée dès que la variable de déclencheur définie sur le Mappage E/S l'onglet montre un front montant.