Exemple : utilisation du ControlLoopLibrary Bibliothèque
Produit: À l'aide du ControlLoopLibrary Bibliothèque
Les exemples montrent comment utiliser les blocs fonctionnels du ControlLoopLibrary bibliothèque pour implémenter des composants de l'ingénierie de commande numérique.
Descriptif
Le ControlElement Libraries Examples le package comprend quatre projets :
FilterSampleTransferFunctionsSampleWaterLevelSampleWaterLevelSampleExtended
Projet : FilterSample
Le FilterSample Un exemple de projet montre comment filtrer un signal bruyant à l'aide des filtres suivants issus de l'ingénierie de contrôle :
FIR (Réponse impulsionnelle finie)
IIR (Réponse impulsionnelle infinie)
SOS (sections de second ordre)
Les exemples d'implémentations sont disponibles dans ST et CFC.
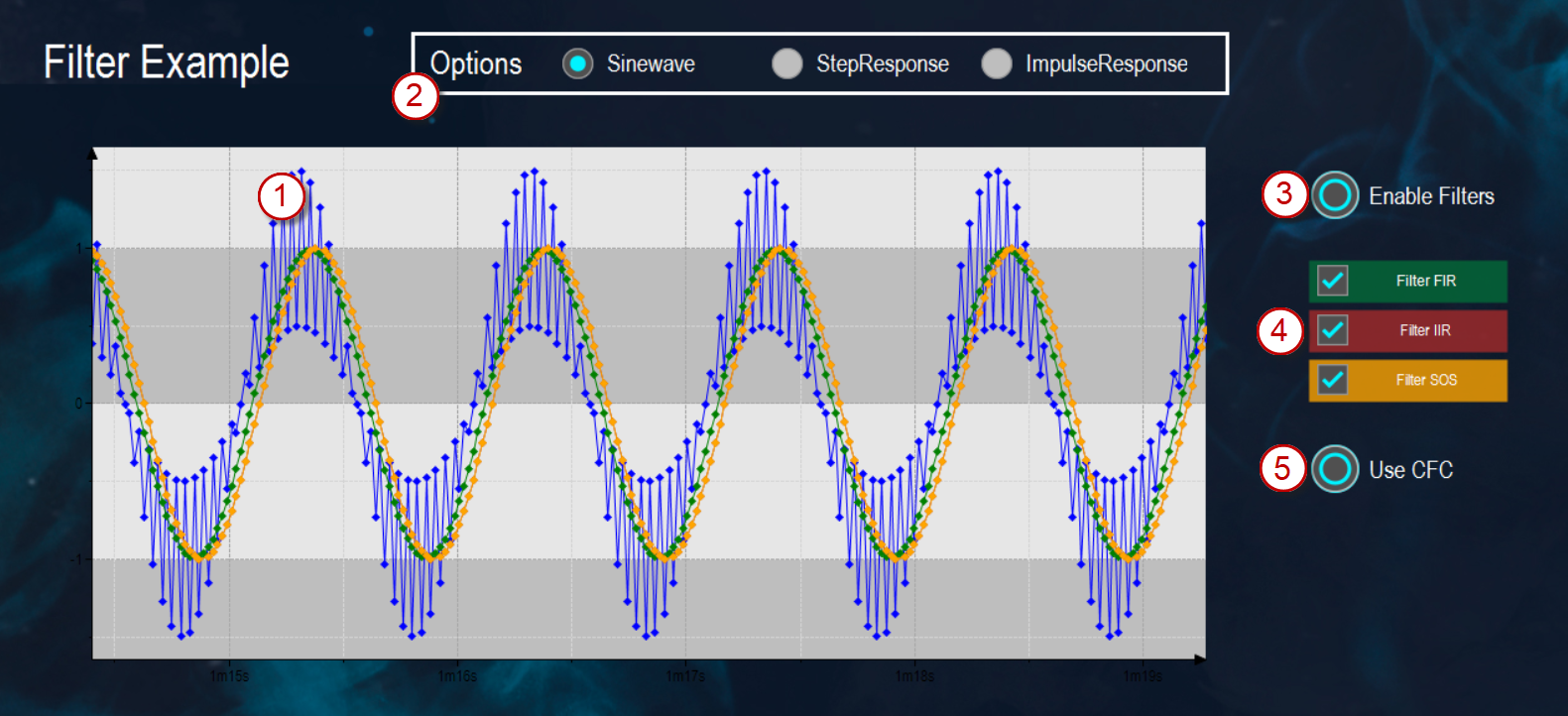
(1) |
| Forme d'onde du signal bleu : le programme simule un signal bruyant à filtrer. | |
(2) | Options | Onde sinusoïdale | Le signal bruyant est configuré sous la forme d'une onde sinusoïdale à l'aide du |
Étape 1 - Réponse | Le signal bruyant est configuré par étapes à l'aide du | ||
Réponse impulsionnelle | Le signal bruyant est configuré comme une impulsion à l'aide du | ||
(3) | Activer les filtres | Active et désactive les filtres applicables. Le filtrage peut être défini indépendamment de la sélection en cours. | |
(4) | Filtre FIR | Courbe de signal verte : le signal est filtré à travers le filtre FIR. | |
Filtre IIR | Courbe de signal rouge : le signal est filtré à travers le filtre IIR. | ||
Filtre SOS | Courbe de signal jaune : le signal est filtré par le filtre SOS. | ||
(5) | Utiliser du CFC | Choisissez si le programme s'exécute en arrière-plan en tant que ST ou en tant que CFC. | |
Projet : TransferFunctionsSample
Le TransferFunctionsSample le projet inclut les applications suivantes :
Application_ControlLoopApplication_StepResponse
Candidature : Application_ControlLoop
Le Application_ControlLoop L'application représente un modèle de boucle de régulation. Un contrôleur PI fait office d'unité de commande.
Dans l'exemple, une fonction de transfert PT1 représente un moteur en tant qu'actionneur du système contrôlé.
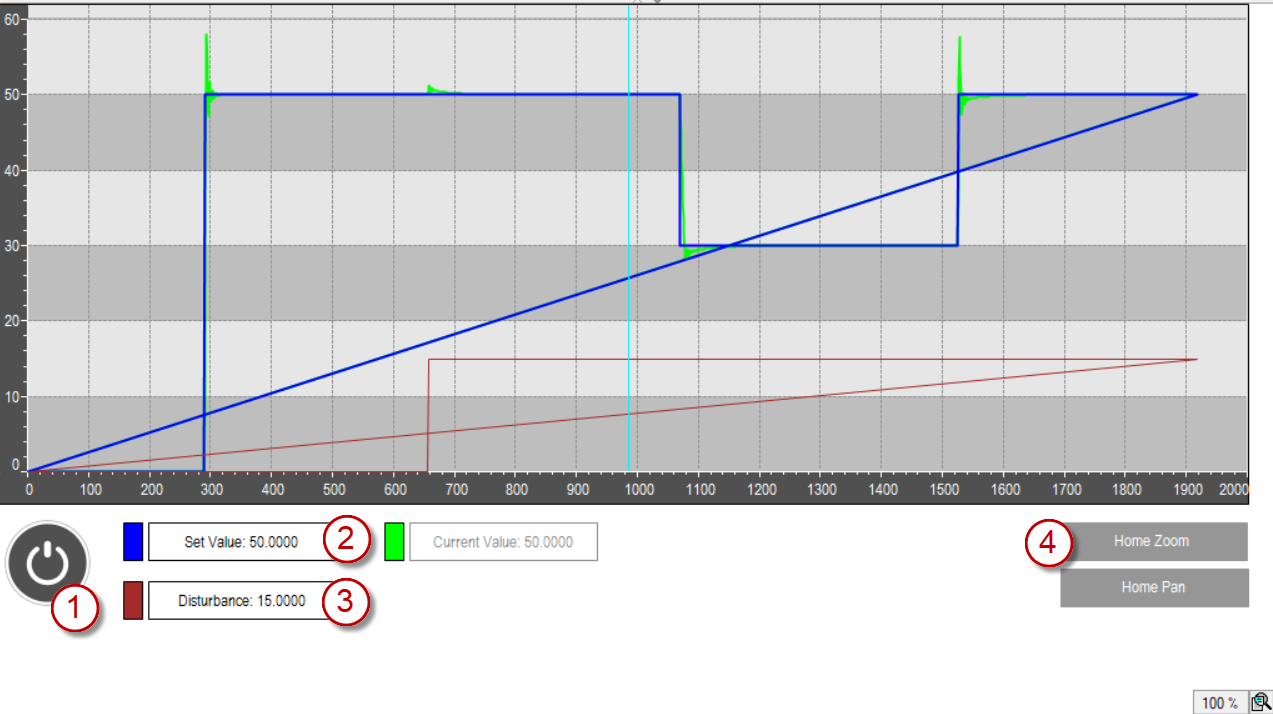
(1) |
| Démarre la simulation ; un autre clic réinitialise la simulation. |
(2) | Définir la valeur | Spécifie la valeur cible |
(3) | Perturbation | Spécifie l'ampleur de la perturbation. |
(4) | Accueil Zoom | Réinitialise la vue pour afficher l'intégralité de la courbe de données dans le graphique. |

Candidature : Application_StepResponse
Le Application_StepResponse L'application montre le comportement de différentes fonctions de transfert pour des paramètres spécifiques.
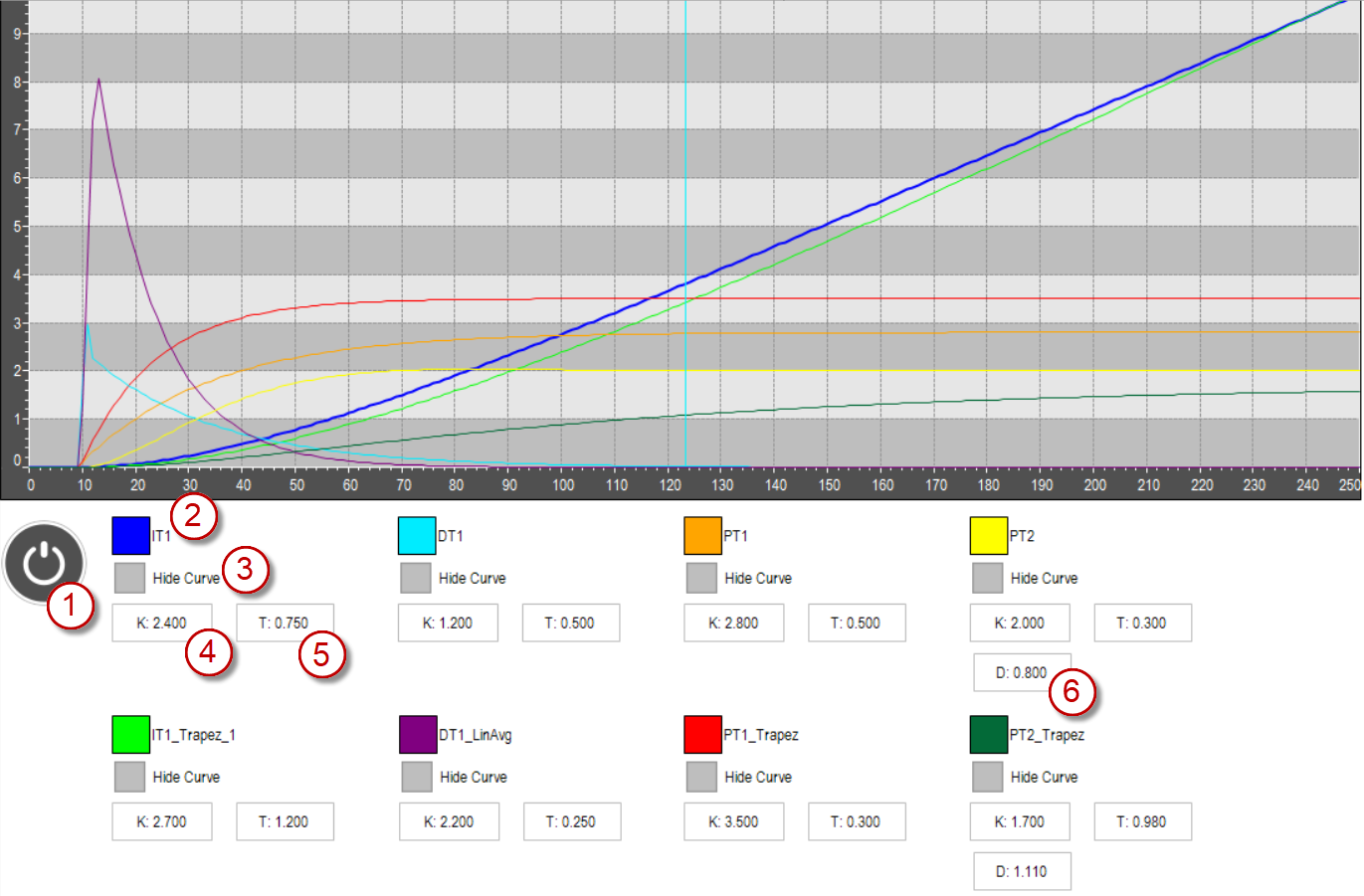
(1) |
| Démarre la simulation ; un autre clic réinitialise la simulation. |
(2) |  | La couleur respective de la courbe de données d'une fonction de transfert dans le diagramme. |
(3) | Masquer la courbe | Masque ou affiche la fonction de transfert correspondante. |
(4) | K | Gain de la réponse du pas |
(5) | T | Constante de temps de la réponse de l'étape |
(6) | D | Atténuation de la réponse du pas |
Projet : WaterLevelSample
Le WaterLevelSample exemple montre un réservoir d'eau dont le niveau de remplissage doit être maintenu constant par diverses stratégies de contrôle. L'eau s'écoule en continu par une vanne située au fond du réservoir. Le régulateur régule le débit d'eau dans le réservoir afin de neutraliser le débit sortant
Plus précisément, une commande PID et différentes versions de régulateurs à deux points sont utilisées.
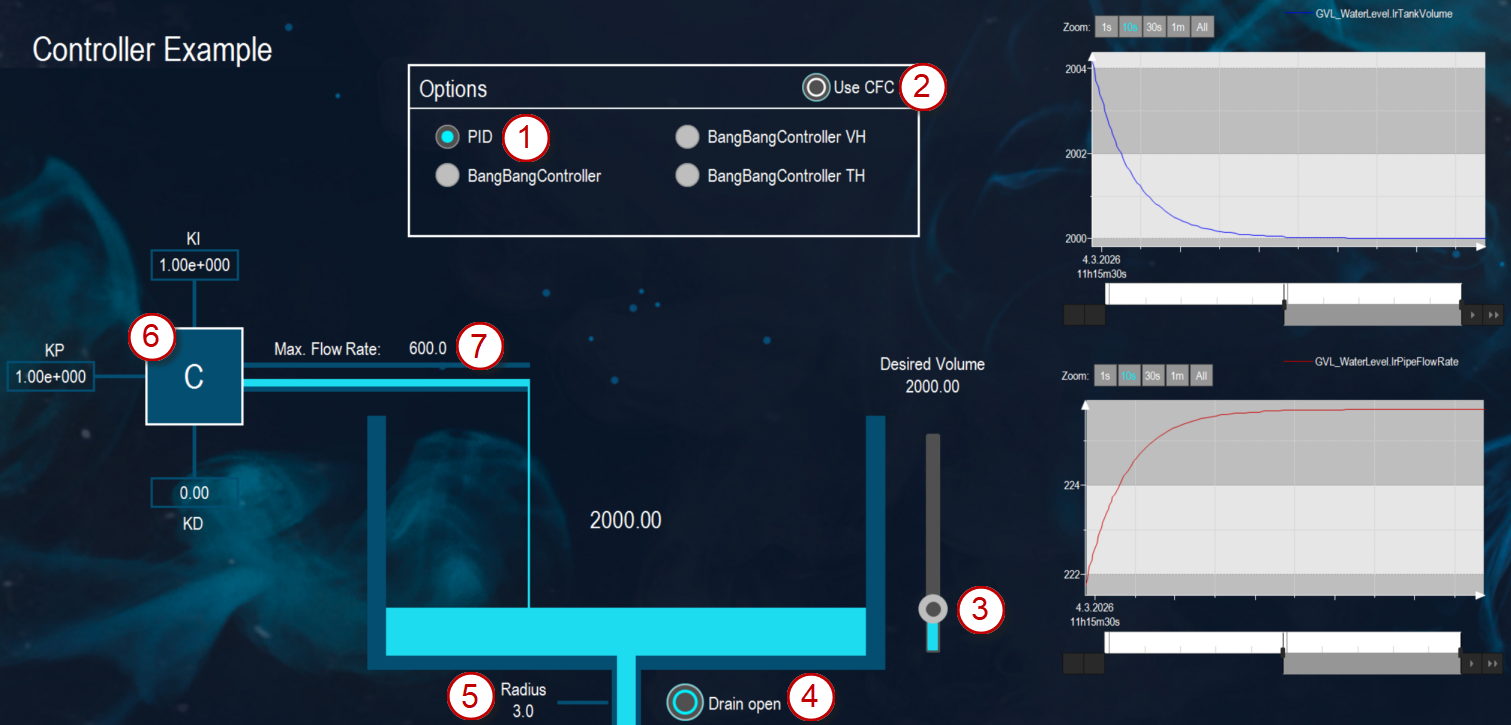
(1) | Options | PID | Une commande PID est utilisée pour réguler la valeur de réglage. |
Manette Bang Bang Bangbang Controller VH Contrôleur Bangbang TH | Une commande bang-bang est utilisée pour régler la valeur définie. | ||
(2) | Utiliser du CFC | Choisissez si le programme s'exécute en arrière-plan en tant que ST ou en tant que CFC. | |
(3) | Volume souhaité | Le curseur situé à côté du réservoir d'eau configure le niveau de remplissage cible souhaité. | |
(4) | Égoutter ouvert | Ouvre et ferme le robinet de vidange | |
(5) | Rayon | Modifie le rayon du tuyau de vidange | |
(6) | KI KP KD | Définissez les paramètres du contrôle PID. | |
(7) | Max. Débit | Définit le débit maximal du tuyau d'arrivée d'eau. | |
Projet : WaterLevelSampleExtended
Le WaterLevelSampleExtended le projet est basé sur WaterLevelSample exemple.
Il montre également comment utiliser un contrôleur à trois points.
Exigences et restrictions du système
Système de programmation | Système de développement CODESYS version 3.5.18.50 ou supérieure |
Système d'exécution | CODESYS Control Win version 3.5.18.50 ou supérieure Remarque : utilisez la version gratuite Lecteur de périphériques application (disponible dans le CODESYS Store International) pour connaître les fonctions prises en charge par le contrôleur. |
Composants complémentaires | - |
Exigences supplémentaires | - |