Transformación de 5 ejes
Con la transformación de 5 ejes, puede controlar cinemáticas que constan de tres ejes espaciales lineales (X, Y, Z) y un cabezal de herramienta. El cabezal de la herramienta consta de dos ejes que sujetan la herramienta. Un eje de herramienta gira alrededor del eje Z y la herramienta inclina a los demás de acuerdo con el siguiente esquema.
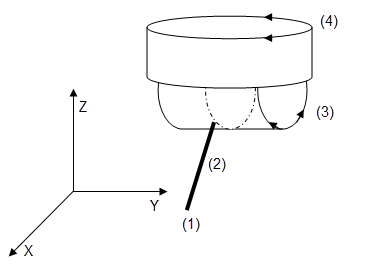
Parámetro: Longitud de dTool = Distancia desde el punto de procesamiento (punta de la herramienta = TCP) hasta la inclinación del eje giratorio.
Posición X/Y/Z del punto de procesamiento (TCP) que se incluye en
pi.dX, pi.dY, pi.dZ. Unidad: Unidades de posición de los ejes.Orientación de la herramienta por coordenadas esféricas (inclinación y acimut) que se incluyen en
pi.dBypi.dC. Unidad: Grados angulares.
El punto de procesamiento (TCP) se encuentra en la posición (
0/0/-dTool).La herramienta se extiende en la dirección del eje Z negativo. La inclinación del eje giratorio se coloca de tal manera que al girar en la dirección positiva, la herramienta se movería en la dirección del eje X positivo.
Para el movimiento N30, el eje de inclinación que primero apunta en la dirección X se gira y permanece inclinado en la dirección X negativa al final del movimiento.
N0 PB360 PC360 (set axis B and C in modulo mode 360) N10 F10 FB100 FC100 (velocity in X/Y/Z: 10, in B and C 100) N20 G0 X0 Y0 Z0 C0 B30 (start position) N30 G1 X20 B-30 (target position)
Para más información, ver: SMC_TRAFO_5Ejes (FB) y SMC_TRAFOF_5Ejes (FB)