Cinemática incluida en CODESYS SoftMotion
tabla 62. Sistemas de pórtico
Nombre | Representación | Se puede vincular con cinemática de orientación. | información adicional |
|---|---|---|---|
Gantry2 | ✓ | ||
Gantry3 | ✓ | ||
HGantry2 | 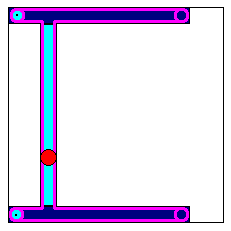 | ✓ | |
HGantry3 | 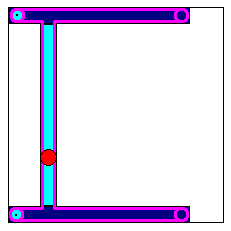 | ✓ | |
TGantry2 | 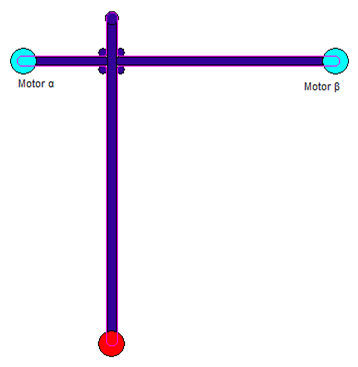 | ✓ | |
pórtico de 5 ejes | -- |
tabla 63. Sistemas SCARA
Nombre | Representación | Se puede vincular con cinemática de orientación. | información adicional |
|---|---|---|---|
Polar | 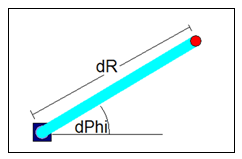 | ✓ | |
Polar con eje Z | 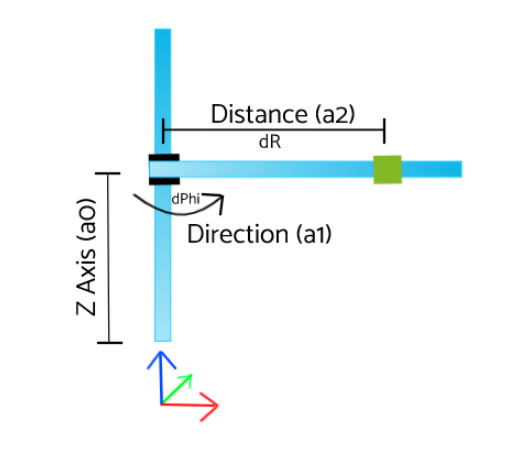 | ✓ | |
Scara2 con eje Z | 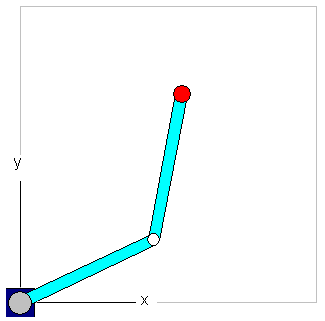 | ✓ | |
Scara3 con eje Z | 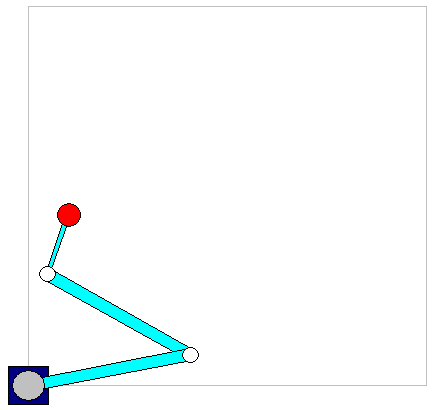 | -- |
tabla 64. Robots articulados
Nombre | Representación | Se puede vincular con cinemática de orientación. | información adicional |
|---|---|---|---|
Robot articulado de 3 ejes giratorios. | 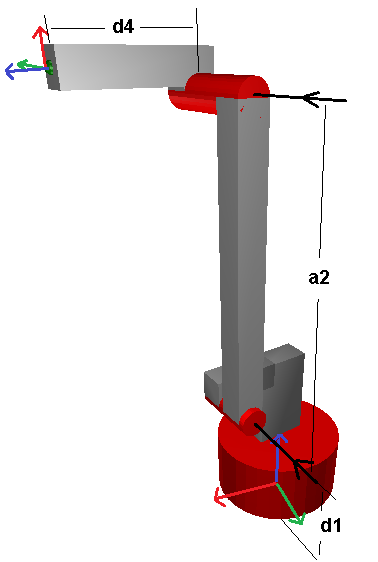 | ✓ | |
paletizador de 4 ejes | 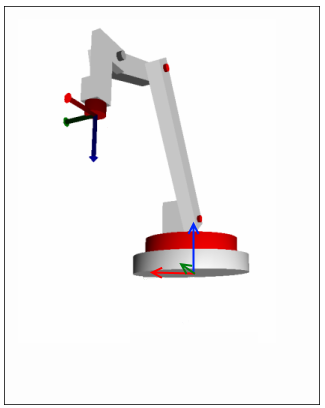 | -- | |
robot articulado de 6 ejes | 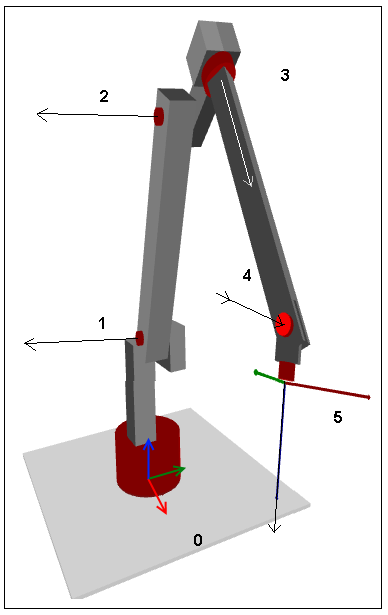 | -- |
tabla 65. Sistemas paralelos
Nombre | Representación | Se puede vincular con cinemática de orientación. | información adicional |
|---|---|---|---|
Bípode con ejes giratorios. | ✓ | ||
Trípode con ejes giratorios. | 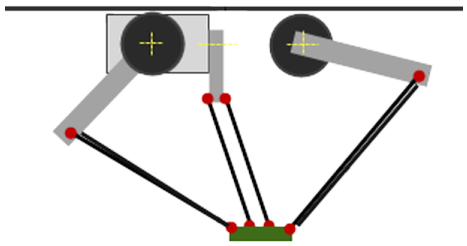 | ✓ | |
Trípode con ejes lineales. | 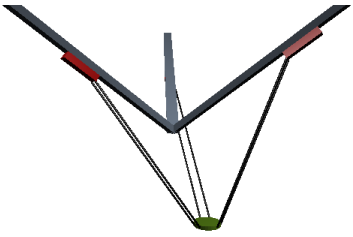 | ✓ |
tabla 66. Cinemática de orientación
Nombre | Representación | información adicional |
|---|---|---|
eje C | ||
Eje C con herramienta | ||
Herramienta | ||
Wrist2 |  | |
Wrist3 |