Descripción general de los tipos de segmentos definidos
CODESYS SoftMotion proporciona varios tipos de segmentos para levas.
Dependiendo de formato de compilación, solo se admiten algunos de los tipos de segmentos:
XYVA: Solo Line y Poly5.
Segmentos: se admiten todos los tipos de segmentos.
Tipo de segmento | Parámetros | Curva |
|---|---|---|
Poly7 | . Condiciones límite
| 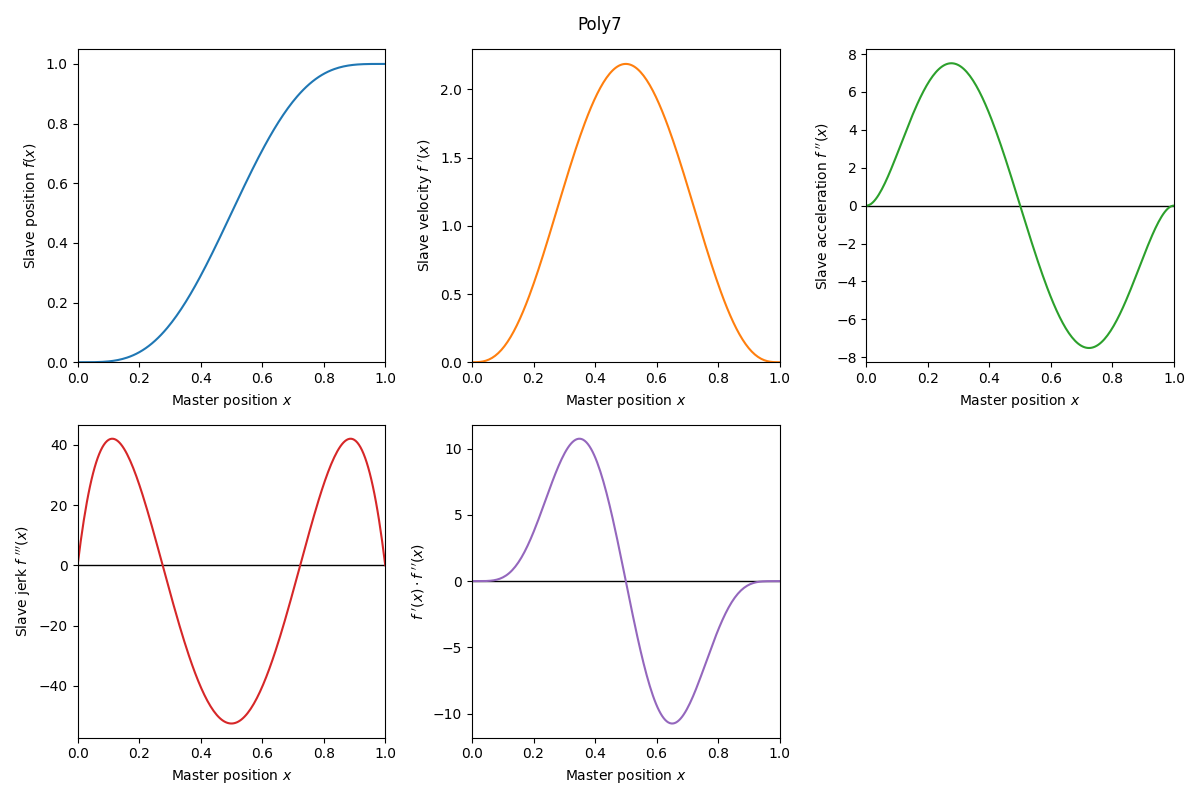 |
Poly5 | . Condiciones límite
| 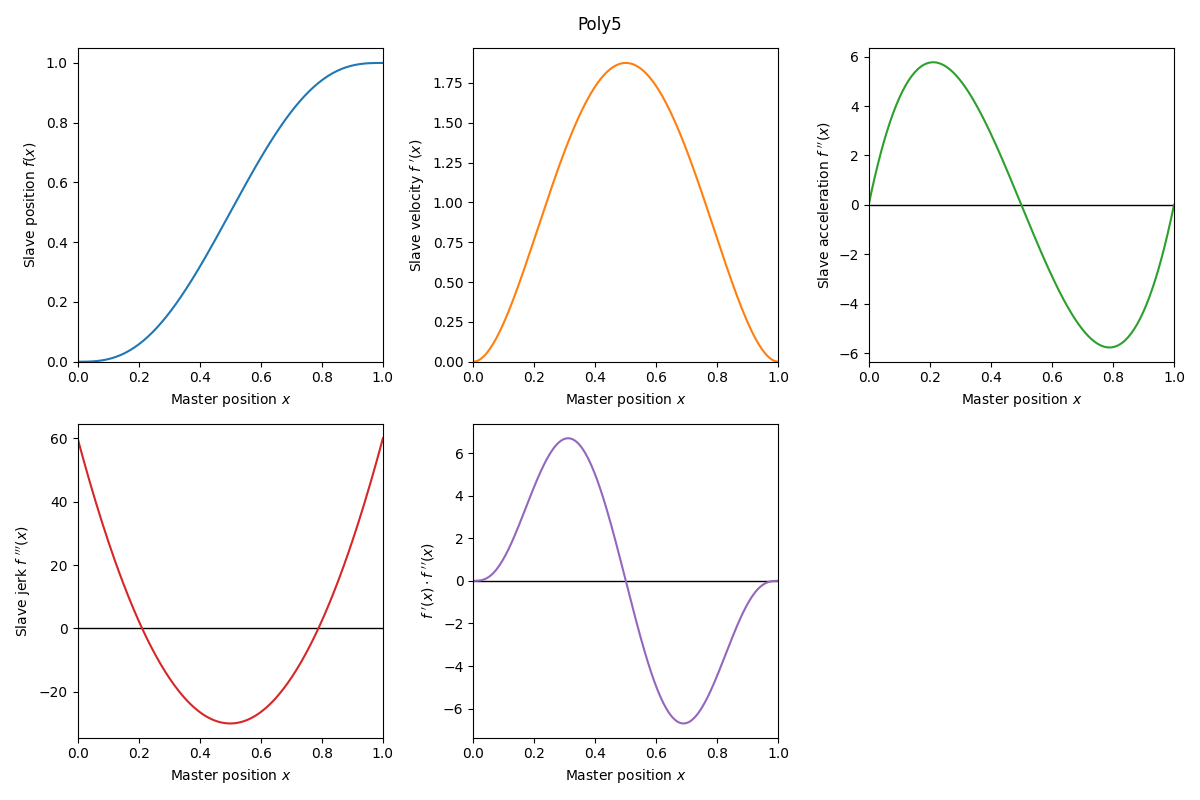 |
ModifiedSine | . Condiciones límite
. Parámetros de segmento
| 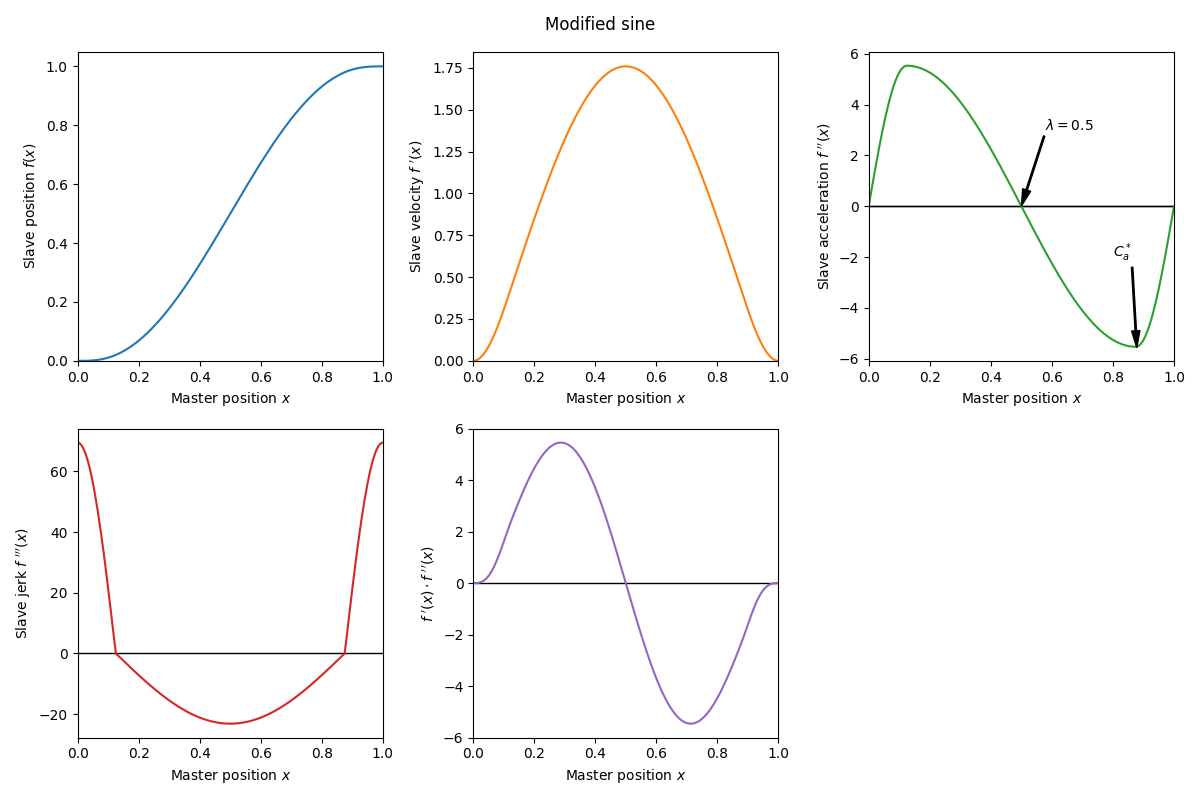 |
Line | . Condiciones límite
| 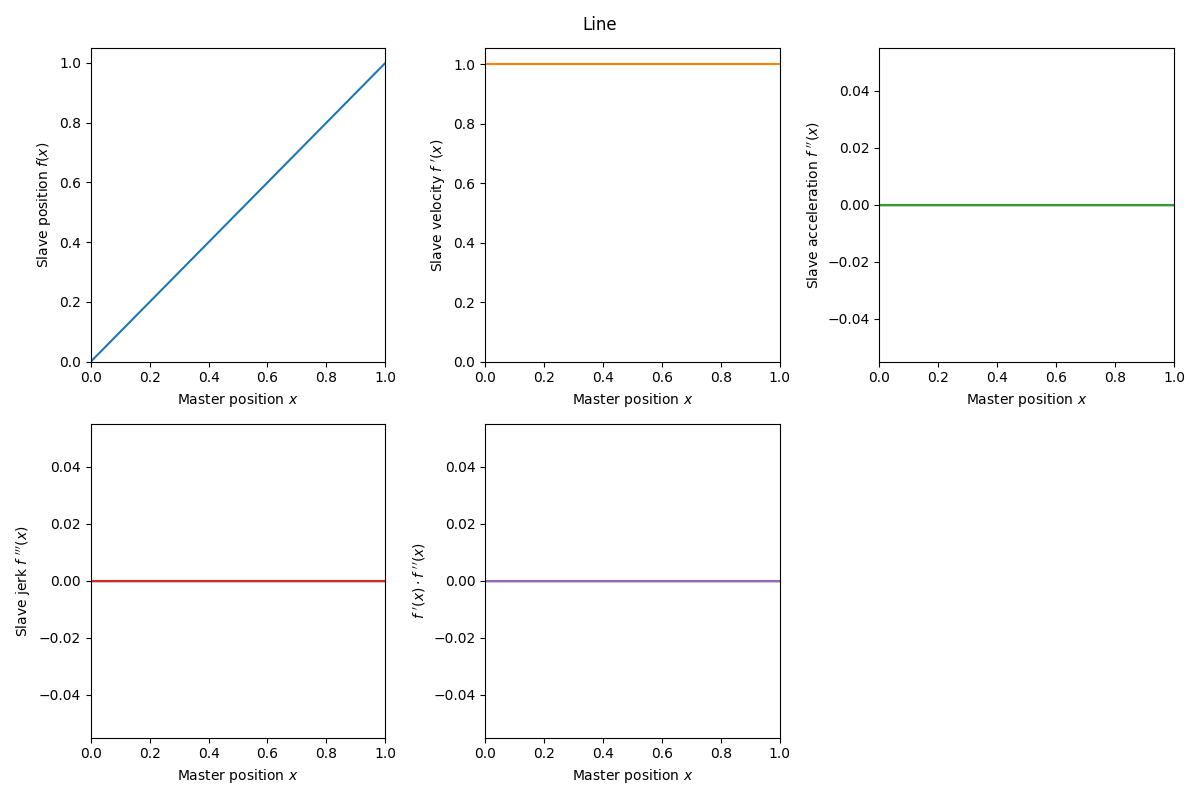 |
InclinedSine | . Condiciones límite
| 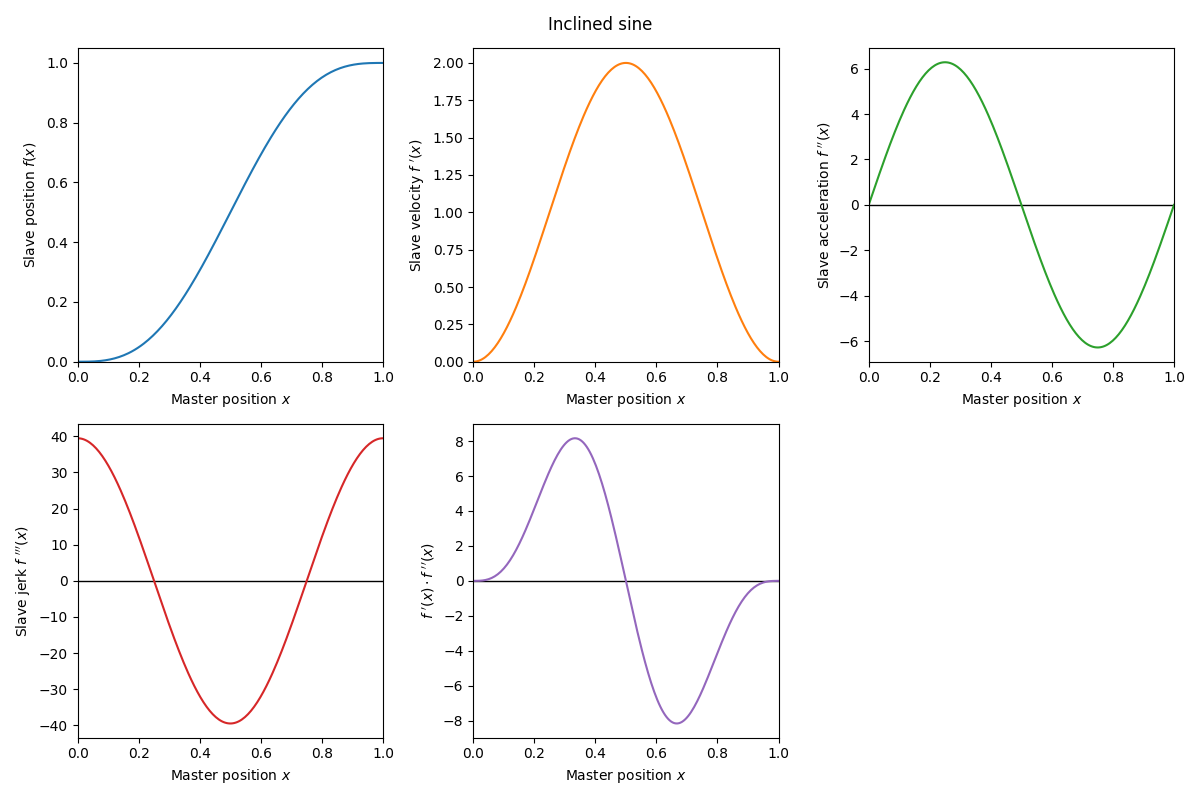 |
La selección del tipo de segmento depende de la aplicación, ya que cada tipo tiene propiedades dinámicas especiales. Hay varios tipos de segmentos aplicables en función de la tarea de movimiento (por ejemplo, permanencia: velocidad constante).
En la tabla siguiente se ofrece una descripción general:
Morar (v=0, a=0) | Velocidad constante (v≠0, a=0) | Reversión (v=0, a≠0) | Movimiento (v≠0, a≠0) | |
|---|---|---|---|---|
Morar (v=0, a=0) |
|
|
|
|
Velocidad constante (v≠0, a=0) |
|
|
|
|
Reversión (v=0, a≠0) |
|
|
|
|
Movimiento (v≠0, a≠0) |
|
|
|
|