Definición de un SoftMotion Leva
Una leva describe la dependencia funcional de un accionamiento (esclavo) de otro accionamiento (maestro). La relación se describe mediante una función continua (o curva) que asigna un rango definido de valores maestros a valores esclavos. Para ser más precisos: después de dividir el eje maestro en segmentos adecuados, el gráfico de estas funciones se puede representar en cada uno de estos intervalos mediante una línea o un polinomio de quinto grado.
Los valores maestros se aplican al eje horizontal y los valores esclavos al eje vertical en el gráfico de levas.
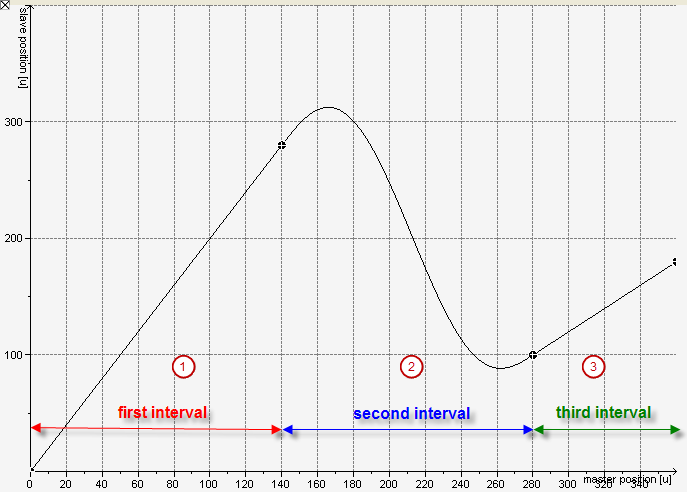
En el ejemplo, los valores maestros están entre 0 y 360. Este rango se divide en tres intervalos:
(1) Primer intervalo: [0, 140]
(2) Segundo intervalo: [140, 280]
(3) Tercer intervalo: [280, 360]
La función (gráfico) es lineal en el primer y tercer intervalo y su gráfico se muestra como una línea. Como resultado, su primera derivada (pendiente) es constante y todas las derivadas superiores son 0.
En el segundo intervalo, el gráfico se describe mediante un polinomio de quinto grado. Por lo tanto, su primera derivada es un polinomio de cuarto grado, su segunda derivada (curvatura) es un polinomio de tercer grado, su tercera derivada es un polinomio de segundo grado, etc.
Cuando la función describe el movimiento del esclavo en función de la posición del maestro, su primera derivada corresponde a la velocidad del esclavo y la segunda derivada a su aceleración.
Cuando se tiene en cuenta esta interpretación física, es obvio que el mapeo tiene que ser continuo. Esto significa que su gráfico no puede tener saltos. En particular, la continuidad también debe cumplirse en cada punto donde se encuentran dos intervalos. Además, la continuidad en general también es requerida por la primera y segunda derivada. (De hecho, estas tres condiciones de continuidad en los puntos inicial y final de un intervalo determinan los coeficientes del polinomio de quinto grado insertado entre dos segmentos rectos.
Además, puede agregar empujadores (interruptores binarios) a la leva en cualquier posición. De esta forma, puede crear tablas de leva que contengan solo empujadores. A continuación, la posición del esclavo se pone a cero en todo el rango de valores del maestro.