Pestaña: General
Tipo de eje | |
Modo virtual |
Nota: También puede configurar y restablecer un modo virtual de una unidad en código IEC mediante el |
Modulo |
Valor de módulo [u]: Valor de un ciclo (período de módulo) El valor se guarda en el Nota: si selecciona el Modulo tipo de unidad, luego el producto |
Finito |
Interruptores de fin de carrera por software Activado
|
Tipo de motor | |
Rotary |
|
Lineal |
|
Tipo de rampa de velocidad Define el perfil de velocidad para los módulos maestro/esclavo y de eje único que generan movimiento: Nota: Los tipos de rampa Sin² y Cuadrático (suave) no son compatibles con la robótica. | |
Trapezoide |
|
Pecado² |
|
cuadrática |
|
Cuadrático (suave) |
|
Identificación | |
ID | Identificador de números enteros. Debe ser único para cada unidad. Por ejemplo, este identificador se utiliza en el registro del PLC para identificar la unidad cuando se produce un error. |
Tiempo muerto | |
Ciclos | El tiempo muerto en los ciclos entre |
Límites dinámicos Se tienen en cuenta los valores límite de las POU de la parte 4 de PLCopen. Además, las POU de la biblioteca las utilizan con | |
Velocidad [u/s] | Valor límite de velocidad, aceleración, desaceleración y tirón |
Aceleración [u/s²] | |
Deceleración [u/s²] | |
Imbécil [u/s³] | |


Límites de software | |
Activado |
|
Reacción de error de software . Causas de un error de software
Para la reacción de error del software, el Desaceleración, el Max., y se tiene en cuenta la desaceleración de los límites dinámicos. La desaceleración también se calcula a partir de la distancia máxima. El valor más alto de estos valores de desaceleración se utiliza para | |
Deceleración [u/s²]: | Desaceleración de la rampa de error |
Distancia máxima [u] | Opcional La unidad debe haberse detenido dentro de esta distancia después de que se haya producido un error. |
Monitorización del desfase de posición Respuesta del sistema a un retraso detectado. Se detecta un retraso cuando la diferencia entre la posición establecida y la posición real compensada supera el límite de retraso. La posición real extrapolada se calcula con la siguiente fórmula:
Este valor es la posición real del eje compensada por el tiempo muerto. Nota: Si está monitoreando el retraso, debe determinar e ingresar el tiempo muerto. Para obtener una descripción, consulte el capítulo siguiente: Valores reales, valores establecidos y tiempo muerto. Nota: La supervisión del retraso no está disponible para las unidades virtuales. | |
Desactivado | Sin respuesta La monitorización del retraso está desactivada. |
Desactivar la unidad | El |
Haz una parada rápida | El |
Manténgase habilitado | La unidad permanece encendida, pero todos los movimientos de marcha se detienen bruscamente. |
Límite de retraso: | Monitorización del retraso en el controlador La supervisión independiente también puede existir en la unidad, pero no está configurada en este cuadro de diálogo. |
Para más información, ver: Determinación del tiempo muerto del sistema
Las siguientes imágenes demuestran el efecto de los diferentes tipos de rampa. La posición se dibuja en verde, la velocidad en azul y la aceleración en rojo.
Trapezoide La velocidad es parcialmente lineal y continua, mientras que la aceleración parcialmente constante indica saltos. | 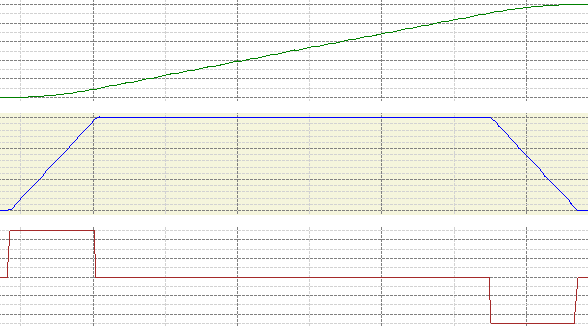 |
Sin² Las rupturas en el perfil de velocidad se suavizan (utilizando la función sin² en lugar de líneas) para reducir los saltos de aceleración. El usuario no puede limitar el tirón para este tipo de rampa. El tirón máximo establecido tiene efecto solo si la aceleración no es igual a cero al comienzo del movimiento y la rampa de desaceleración y aceleración interrumpida no puede continuar sin problemas. Luego, teniendo en cuenta el límite de tirones, la aceleración se reduce a cero antes de que se inicie el movimiento actual. En comparación con el perfil de velocidad trapezoidal, la desaceleración lleva más tiempo en este caso. | 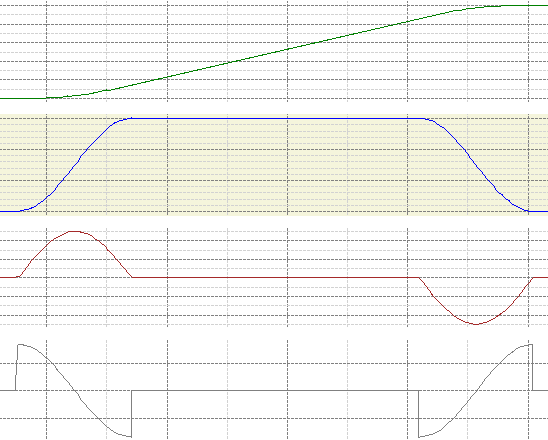 |
Cuadrático La aceleración es parcialmente lineal y continua y el tirón tiene saltos. La velocidad consta de segmentos cuadráticos y lineales. | 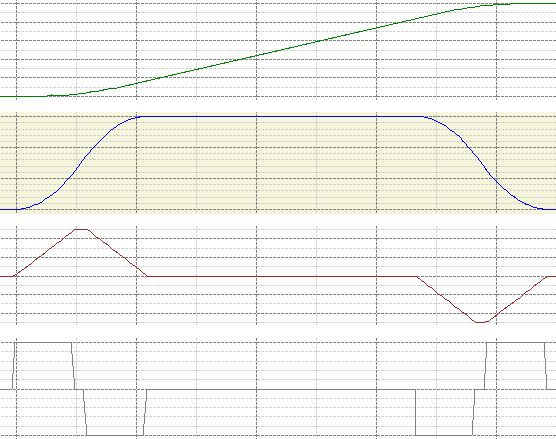 |
Cuadrático (suave) Las rampas de aceleración lineal del tipo de rampa cuadrática se reemplazan por una función "suave" con un valor de pendiente cero al principio y al final. Como resultado, el tirón también es continuo. Nota: Si se interrumpe un movimiento, pueden producirse interrupciones en el tirón. | 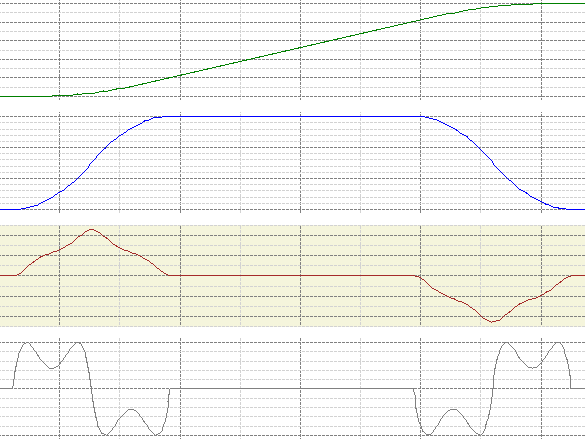 |
Para obtener más información, consulte: Interrupción de movimientos