Sistemas de coordenadas
CODESYS SoftMotion Robotics proporciona diferentes sistemas de coordenadas en los que se pueden controlar los movimientos.
Sistema de coordenadas de ejes (ACS)
Sistema de coordenadas de herramientas (TCS)
Sistema mundial de coordenadas (WCS)
Sistema de coordenadas de máquinas (MCS)
Sistema de coordenadas del producto (PCS_1, PCS_2)
Sistema de coordenadas | Descripción |
|---|---|
Sistema de coordenadas de ejes (ACS) | El sistema de coordenadas del eje define un sistema de coordenadas en el espacio del eje donde cada eje del robot abarca una dimensión. Como resultado, se puede especificar una posición para cada eje del robot |
Sistema de coordenadas de herramientas (TCS) | El sistema de coordenadas de la herramienta es un sistema de coordenadas cartesianas que se encuentra en el punto central de la herramienta (TCP) de la cinemática. Su posición y orientación dependen de la posición del robot |
Sistema mundial de coordenadas (WCS) | El sistema de coordenadas mundial es un sistema de coordenadas cartesianas estático y constituye la base de todos los sistemas de coordenadas posteriores. Estos se definen en relación con el sistema de coordenadas mundial |
Sistema de coordenadas de máquinas (MCS) | El sistema de coordenadas de la máquina es un sistema de coordenadas cartesianas estáticas. La posición y la orientación del MCS en relación con el robot físico están definidas por El Transformación de coordenadas MC_Set el bloque de funciones se puede usar para cambiar el sistema de coordenadas en relación con el sistema de coordenadas mundial (WCS). |
Sistema de coordenadas del producto (PCS_1, PCS_2) | Los sistemas de coordenadas del producto son sistemas de coordenadas cartesianas que el usuario puede definir. Se expresan en relación con el sistema de coordenadas mundial (WCS) y pueden ser estáticos o dinámicos . Estática
. Dinámica Los siguientes bloques de funciones se pueden utilizar para definir sistemas de coordenadas dinámicos: |
Posición inicial y orientación de los sistemas de coordenadas
La cinemática del robot determina la posición inicial y la orientación de los sistemas de coordenadas. Esto se describe en la documentación de la cinemática
Posición y orientación del sistema de coordenadas de la máquina (MCS) en relación con el robot físico
Posición y orientación del punto central de la herramienta (TCP) en relación con el MCS y, por lo tanto, con el sistema de coordenadas de la herramienta (TCS)
Posición cero del robot, así como las direcciones de rotación o movimiento de los ejes individuales
El sistema de coordenadas mundial (WCS) y los sistemas de coordenadas del producto (PCS_1, PCS_2) no se desplazan inicialmente y son idénticos al sistema de coordenadas de la máquina.
Múltiples robots y piezas
La posición y la orientación de los sistemas de coordenadas se definen para cada robot. Cuando varios robots trabajan juntos, puede resultar útil definir el sistema de coordenadas mundiales (WCS) como un sistema de coordenadas base común. Basándose en este sistema de coordenadas, los sistemas de coordenadas de máquinas (MCS) y los sistemas de coordenadas de productos (PCS_1, PCS_2) de
Ejemplo
Ejemplo de uso de un robot con dos juntas giratorias (a0 y a1)
Cinemática
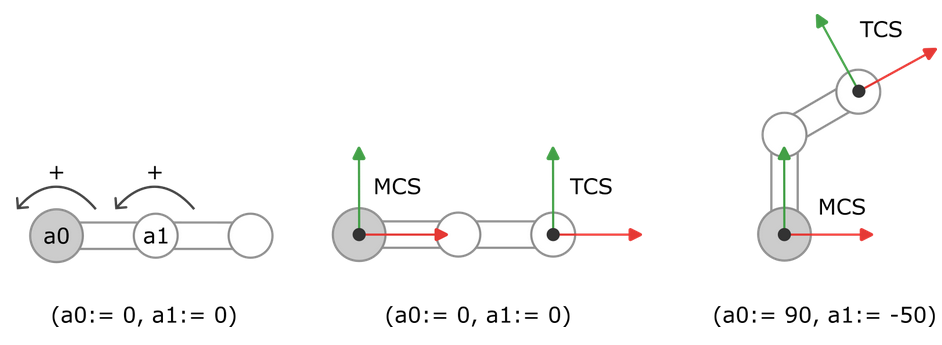
La cinemática define la posición cero del robot (como se muestra a continuación). El origen del sistema de coordenadas de la máquina se encuentra en el eje de rotación del eje a0. El eje X apunta en la dirección del primer enlace cuando la posición del primer a0 es 0. El eje Y apunta en la dirección del primer enlace cuando la posición del primer a0 es +90°. La rotación en sentido contrario a las agujas del reloj corresponde a la dirección de rotación positiva. El punto central de la herramienta (TCP) se encuentra al final del segundo enlace del robot (como se muestra a continuación) y constituye el origen del TCS. El TCS está alineado de tal manera que el eje X discurre a lo largo del segundo enlace
Sistema de coordenadas de ejes (ACS)
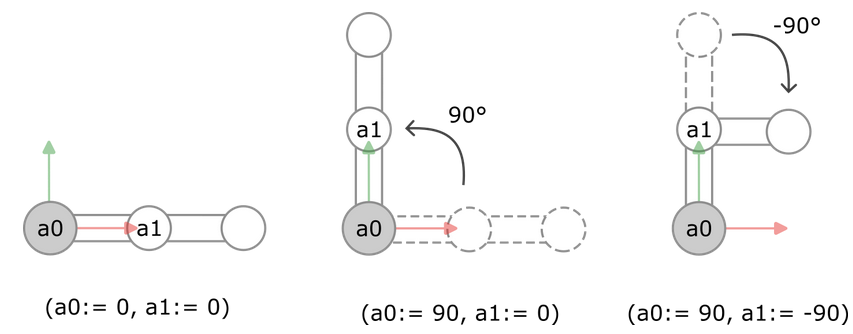
La cinemática ha especificado la posición cero del robot y la dirección de rotación de los ejes individuales. Porque el robot consta de dos ejes a0 y a1, podemos especificar las posiciones de los ejes a0 y a1 en la ACS.
En la primera imagen, especificamos la posición (a0:= 0, a1:= 0). Esto corresponde a la posición cero del robot.
En la segunda imagen, especificamos la posición (a0:= 90, a1:= 0). Partiendo de la posición cero, el primer eje a0 está girado 90° en el sentido de rotación positivo. El segundo eje a1 permanece en la posición cero.
En la tercera imagen, especificamos la posición (a0:= 90, a1:= -90). Partiendo de la posición cero, el primer eje a0 está girado 90° en la dirección de rotación positiva (como en la segunda imagen). Además, el segundo eje a1 está girado 90° en el sentido de rotación negativo.
Sistema de coordenadas de herramientas (TCS)
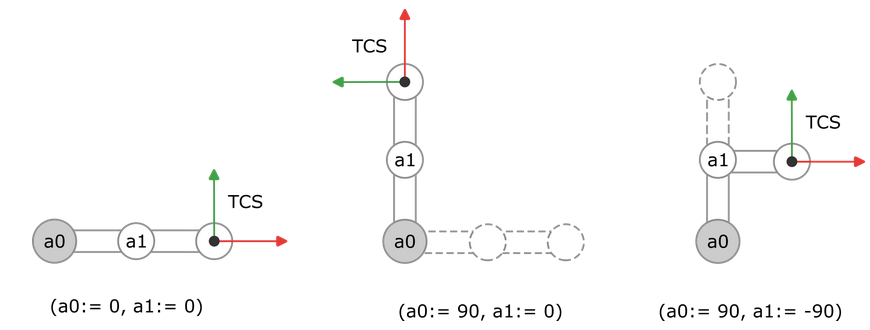
La cinemática define la posición y la orientación del TCP y el TCS. Dependiendo de cómo movamos el robot, la posición y la orientación del TCS
Sistema de coordenadas mundial (WCS), sistema de coordenadas de máquinas (MCS) y sistema de coordenadas de productos (PCS_1, PCS_2)
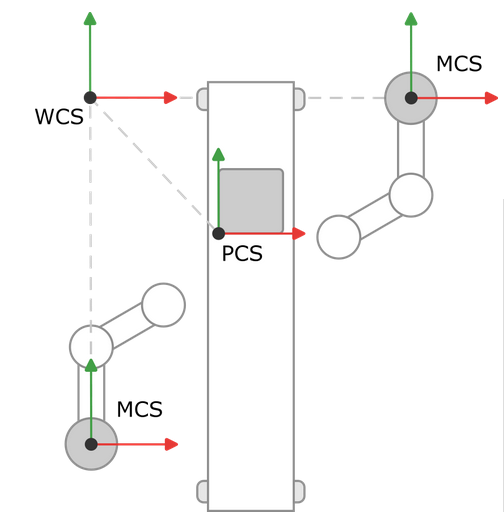
En una nave de producción, dos robots se encuentran a la izquierda y a la derecha de una cinta transportadora. Los robots deben procesar los productos en la cinta transportadora. Definimos un sistema de coordenadas mundial común y lo colocamos en la esquina superior izquierda de nuestra nave de producción. Partiendo de este sistema de coordenadas, determinamos la distancia y la rotación entre los sistemas de coordenadas de la máquina y el producto, y cambiamos los sistemas de coordenadas en consecuencia
En el ejemplo, todos los sistemas de coordenadas están alineados de la misma manera, por lo que solo necesitamos cambiar los sistemas de coordenadas. El sistema de coordenadas de la máquina del robot de la izquierda se desplaza en la dirección Y, el sistema de coordenadas de la máquina del robot de la derecha se desplaza en la dirección X y el sistema de coordenadas del producto se desplaza tanto en la dirección X como en la dirección