Configuraciones cinemáticas
Una configuración cinemática describe la disposición de los ejes en un grupo de ejes entre sí. Dependiendo de la cinemática, son posibles varias configuraciones para la misma posición TCP.
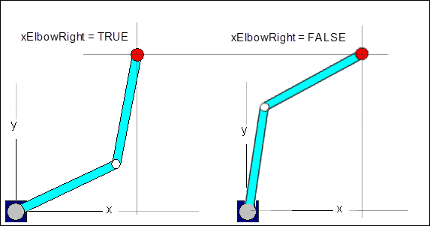
Por ejemplo, se muestran dos configuraciones posibles para SCARA 2.
El grupo de ejes tiene una configuración activa que no necesariamente tiene que corresponder a las posiciones actuales de los ejes. Si se ordena un movimiento, la posición de destino se puede convertir en coordenadas de eje. Se utiliza la configuración que está activa en el momento del comando.
Esta configuración activa se puede establecer con el bloque de función SMC_SetKinConfiguration. Durante la inicialización y cada vez que se cambia la cinemática, el grupo de ejes aplica la configuración estándar. Toda cinemática con una configuración tiene una configuración estándar.
Sugerencia
No es posible un movimiento de CP entre dos configuraciones. En este caso, el posicionamiento debe realizarse mediante un movimiento PTP.
Sugerencia
La configuración actual se puede determinar con el bloque de función MC_GroupReadActualPosition.
Establecer la configuración para un diseño cinemático
Cada diseño cinemático con una configuración tiene su propia POU para calcular los datos de configuración. El nombre de este bloque de función corresponde al nombre de la cinemática más el sufijo _config. La POU convierte las diferentes configuraciones en el tipo de datos ConfigData. Este tipo de datos se pasa al bloque de funciones SMC_SetKinConfiguration.
Llamar al bloque de funciones
Kin_Scara2_Z_Configde la bibliotecaSM3_Transformation. AportexElbowRight= VERDADEROEl bloque de funciones produce los datos de configuración de tipo
ConfigData.Llamar al bloque de funciones
SMC_SetKinConfigurationde la bibliotecaSM3_Robotics. Escribe la entradaConfigDatacon los datos de configuración previamente determinados.Establecer la configuración activa del SCARA 2.
VAR
config: TRAFO.Kin_Scara2_Z_Config;
skc: SMC_SetKinConfiguration;
END_VAR
config(xElbowRight := TRUE);
skc(AxisGroup := Scara2, Execute := TRUE, ConfigData := config.Config);Manejo de cinemáticas acopladas
La cinemática acoplada existe cuando la cinemática de posición y la cinemática de orientación se utilizan simultáneamente. Esto da como resultado la configuración "acoplada" de ambas configuraciones llamando Kin_Coupled_Config de la biblioteca SM3_Transformation. La configuración de la cinemática de posición y la cinemática de orientación se proporciona al bloque de función en las entradas.
Para más información, ver: Ejes rotativos con rango de valor superior a 360 °