Comportamiento en el caso de mezcla
Una propiedad básica del comportamiento de mezcla de CODESYS SoftMotion es que el eje se mueve a lo largo de las mismas posiciones durante la mezcla que durante un movimiento amortiguado. La única diferencia es la velocidad a lo largo de estas posiciones.
Esto es obvio para casos simples. Vea el siguiente ejemplo para esto:
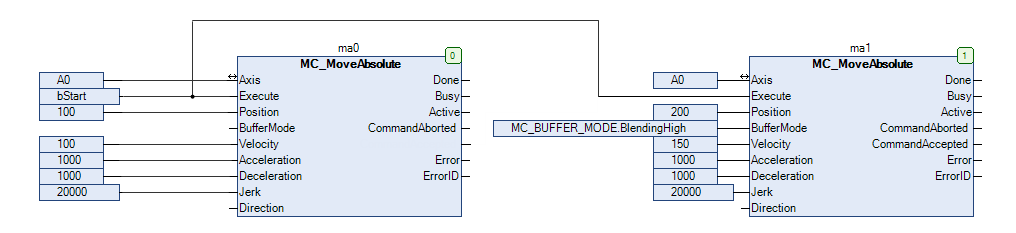
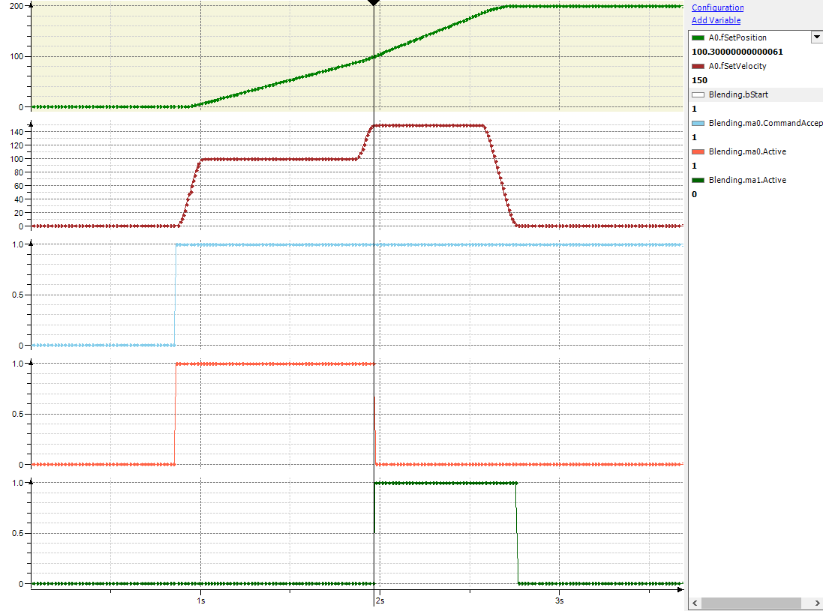
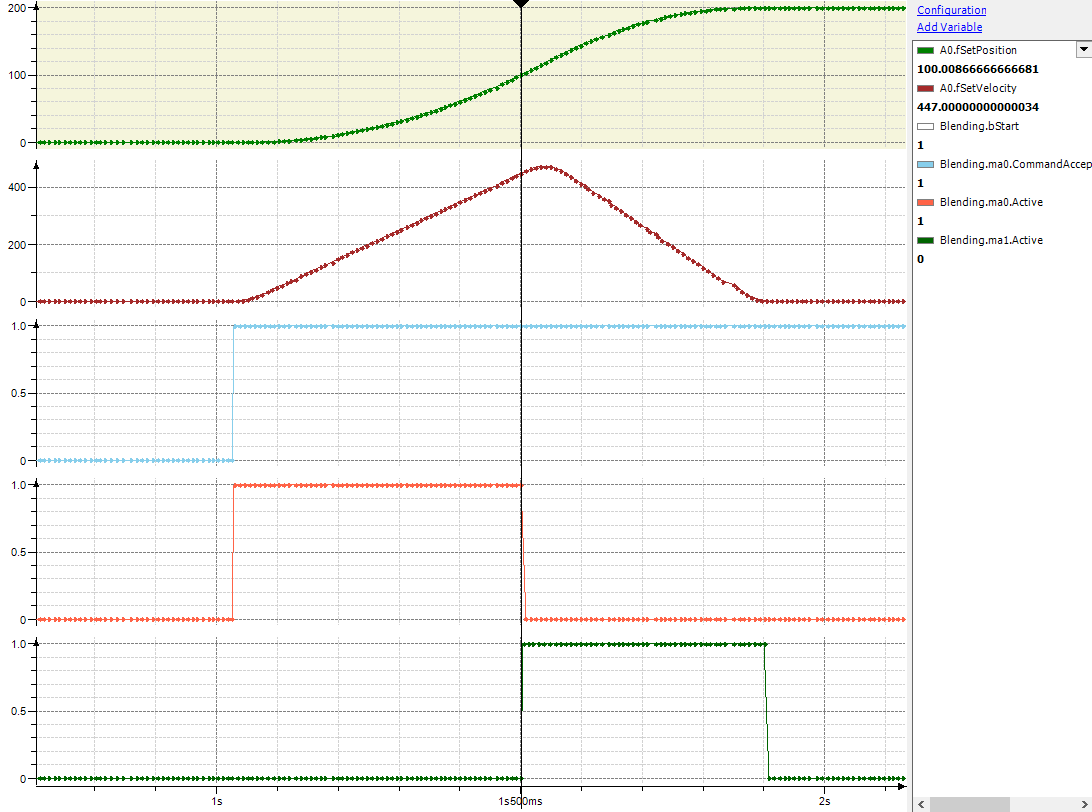
Hay casos en los que la propiedad de recorrer las mismas posiciones por el eje independientemente del modo de amortiguación influye en la velocidad de fusión efectiva entre los dos movimientos. Este es el caso, por ejemplo, si el ejemplo anterior se modifica de modo que la velocidad máxima del segundo movimiento sea tan alta que no pueda alcanzarse en la posición de mezclado. Según las reglas descritas en PLCopen, la velocidad de mezclado debe ser de 500 u/s. Sin embargo, para lograr esta velocidad en la posición 100 u, el eje tendría que invertirse, moverse en dirección negativa a una posición menor que 0 u y luego acelerar a 500 u/s. En cambio, en tales casos, la velocidad de mezcla efectiva se limita a la velocidad máxima que se puede lograr sin inversión ni sobrepaso de posición. En este ejemplo, la velocidad máxima es 447 u/s.
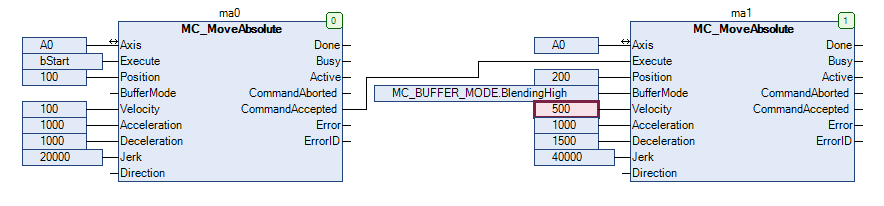
Las siguientes reglas para la velocidad de mezcla efectiva resultan de la propiedad de que el modo de búfer no cambia las posiciones conducidas:
Si no se puede alcanzar la velocidad de mezcla sin sobrepasar la posición, entonces la velocidad de mezcla efectiva es la siguiente velocidad posible que se puede alcanzar sin sobrepasar (consulte el ejemplo anterior).
Nota: La velocidad de mezcla efectiva puede ser mayor o menor que la velocidad de mezcla.
Si la dirección al comienzo del segundo movimiento es opuesta a la dirección del primer movimiento, entonces la velocidad de fusión efectiva se establece en 0. Esto evita que la posición se exceda en la dirección del primer movimiento más allá de su posición de destino.
Si la trayectoria del segundo movimiento es demasiado corta para permitir la desaceleración desde la velocidad de licuado hasta detenerse, entonces se ajusta la velocidad de licuado efectiva. Está ajustado a la velocidad máxima que permite un frenado seguro hasta detenerse en la trayectoria del segundo movimiento.
En el caso de ejes módulo, el efecto de la entrada
DirectiondeMC_MoveAbsoluteno se ve afectado por la fusión con un segundo movimiento. Esto significa que la posición de destino del primer movimiento está siempre en el mismo período de módulo, independientemente de si sigue o no un movimiento de fusión.En el caso de ejes de módulo y un segundo movimiento de tipo
MC_MoveAbsolute, la velocidad de fusión no afecta el período de módulo de la posición objetivo del segundo movimiento cuandoDirection=fastestse usa Esto significa que se selecciona el mismo período de destino independientemente de si el segundo movimiento se ordena conBufferedoBlending.
Aceleración, desaceleración y sacudida durante la mezcla
El modo búfer (BlendingLow/BlendingHigh/BlendingPrevious/BlendingNext) del segundo movimiento determina la velocidad a la que se alcanza la posición inicial del movimiento.
Por el contrario, la aceleración máxima, la desaceleración y la sacudida máxima durante la mezcla son siempre los valores del primer movimiento. Esto se debe a que la posición objetivo del primer movimiento puede superarse si, por ejemplo, el retraso máximo del segundo movimiento es inferior al del primero y se utiliza el menor retraso