Configuración y Puesta en Marcha
CODESYS SoftMotion Light configuración en CODESYS
Agregue un dispositivo de accionamiento al árbol de dispositivos, por ejemplo, su propio dispositivo EtherCAT Slave o CAN Slave.
Debajo de eso, inserte un CODESYS SoftMotion Light eje. Luego haga clic .
Abra el dispositivo EtherCAT o CAN agregado en el editor (accelnet módulo en el ejemplo).
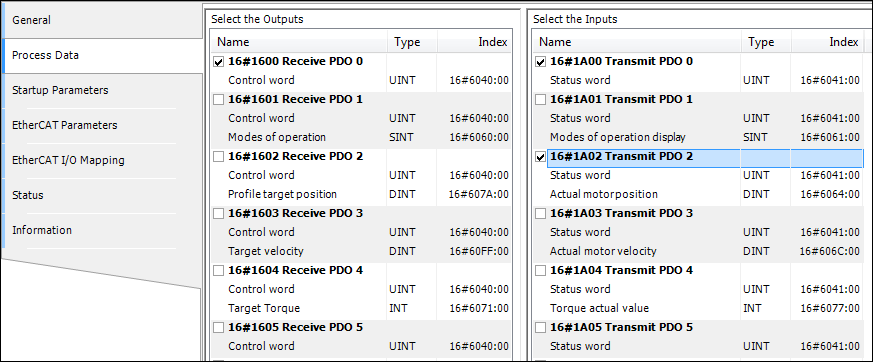
Configure los datos de proceso (PDO) del dispositivo EtherCAT o del dispositivo CAN.
Debe configurar los datos de proceso de modo que la "Palabra de estado" y, opcionalmente, también la "Palabra de control" se transfieran cuando se produzcan cambios. Si la palabra de control no se transfiere a través de PDO, se transferirá a través de SDO tan pronto como cambie. Para ejes modulares, debe transmitir la posición actual al usar
MC_MoveAbsolute_SMLoMC_MoveRelative_SML. Puede transmitir la posición actual de forma síncrona o cuando se produce un cambio. Si la posición se transmite cuando se produce un cambio, debe configurar un Tiempo de inhibición para evitar que la transmisión ocurra con demasiada frecuencia. No es necesario transmitir otros objetos a través de PDO.Ejemplo de una configuración de PDO en el editor de dispositivos EtherCAT:
Cambiar a la Asignación de E/S EtherCAT pestaña. En Actualizar variables, Selecciona el Activa 2 (siempre en tarea ciclo bus) opción.
Cambiar a la General pestaña.
Para unidades EtherCAT, no es necesario utilizar relojes distribuidos. Sin embargo, algunas unidades pueden requerirlos.
Sugerencia
Para las unidades CAN, debe activar el latido del corazón. Como alternativa, puede activar el telegrama SYNC si se transmite la posición actual. En este caso, no se requiere el latido del corazón. Una tercera opción es usar la protección de nodos. La configuración correspondiente se realiza en el General ficha del esclavo CANopen.
Importante
Si no está activo ni un telegrama SYNC, ni un latido, ni la protección de nodos, entonces no puede determinar si la unidad está o no en el estado "operativo".
Abre el CODESYS SoftMotion Light eje en el editor (SML_Drive_GenericDSP402 en el ejemplo).
La configuración es similar a una CODESYS SoftMotion Light eje (consulte la descripción del editor de dispositivos SoftMotion).
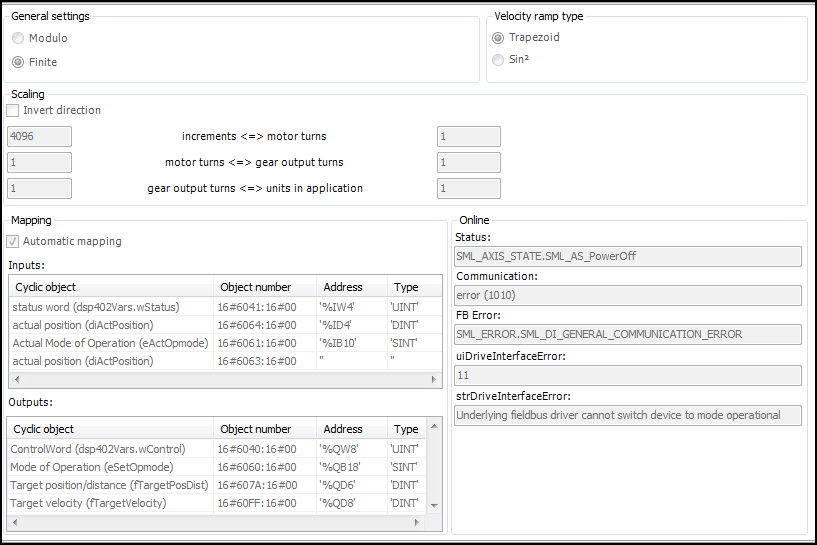
Establezca los siguientes parámetros en el Luz de movimiento suave pestaña:
Configuración general
Módulo: Valor de módulo [u] (período de módulo) encendido.
Finito
Tipo de rampa de velocidad: determina el perfil de velocidad.
trapezoidal: Conduce a un perfil de velocidad trapezoidal (con aceleración constante en cada segmento)
pecado²: Si el variador lo admite, este ajuste conduce a un perfil de velocidad descrito por la función sin² (con una curva de aceleración constante).
Escalada: Establezca los incrementos a las unidades en la aplicación.
Aquí se define el factor para convertir los valores posicionales enteros (Incrementos) en unidades técnicas (Unidades en aplicación). Los valores posicionales fueron recibidos por la unidad y enviados al dispositivo. La unidad técnica es utilizada por el programa IEC. Al establecer los otros parámetros (Rotaciones de motores, Rotaciones de entrada de engranajes, Rotaciones de salida de engranajes), también puede incluir una caja de cambios.
Invertir dirección: Hace que el motor reciba los valores predefinidos con signos invertidos y por tanto gire en sentido contrario.
Cambiar a la Asignación de E/S EtherCAT pestaña del esclavo EtherCAT. Compruebe el mapeo generado automáticamente de CODESYS SoftMotion Light parámetros para direcciones en la memoria de proceso. En determinados casos excepcionales, este mapeo se puede adaptar manualmente.
Si Mapeo automático está habilitado, las entradas y salidas del esclavo EtherCAT se mapean automáticamente.
Puesta en marcha
En el modo en línea, la información sobre el estado, la comunicación y los errores se muestran en la Luz de movimiento suave pestaña de la unidad.
Para apoyar la puesta en marcha, puede utilizar el SML_StartupDrive bloque de funciones (SML_Basic.library) y el VISU_SML_StartupDrive plantilla de visualización (insertar en un elemento de marco de una visualización). De esta manera, puede acceder fácilmente a la mayoría de los CODESYS SoftMotion Light funciones, tales como Power, Home, MoveAbsolute, MoveRelative, y MoveVelocity, así como parámetros de lectura y escritura.