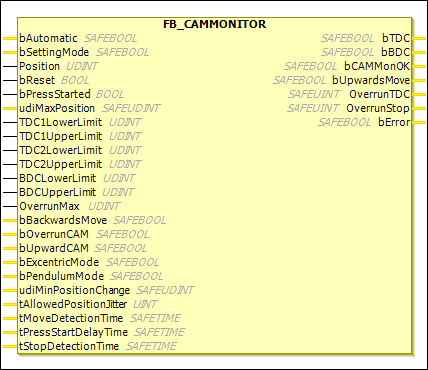
FB_CAMMONITOR
Descripción Bloque de funciones
El FB_CAMMONITOR El bloque de funciones se utiliza para implementar un grupo de levas electrónicas. Además del modo excéntrico, también se admite el modo péndulo.
Modo excéntrico:
En el modo excéntrico sólo se permite un sentido de giro.
Se realiza un control para garantizar que la posición se detiene a más tardar después de un ciclo después del punto de inversión superior (PMS: Punto muerto superior) más el exceso máximo (
OverrunMax).OverrunTDCgenera el exceso de corriente o la posición actual después del PMS.El punto de inversión inferior (BDC: Punto muerto inferior) se especifica con un límite superior e inferior. Una vez superado el BDC, la prensa se encuentra en movimiento ascendente. Esta información se genera en el
bUpwardsMoveproducción.Si la prensa se detiene sin haber alcanzado o superado nuevamente el PMS o si se invierte el sentido de rotación, entonces el
bCamMonOKLa salida se establece inmediatamente enFALSE.Después de alcanzar la parada, sólo se permite un nuevo ciclo después de que se detecte un flanco descendente en el
bResetaporte.El
bBackwardsMoveLa entrada se utiliza para notificar al bloque de funciones que se permite un movimiento hacia atrás de la prensa. Esto sólo está permitido si la posición está entreTDC1UpperLimityBDCLowerLimit. El movimiento de retroceso termina cuandoTDC1UpperLimites alcanzado.En modo excéntrico, se puede conectar una leva ascendente al
bUpwardCAMentrada y se puede conectar una leva de inercia albOverrunCAMaporte. Si elbUpwardCAMLa entrada está activa, luego se realiza una verificación para verificar que la leva ascendente esté configurada después de BDC y se restablezca nuevamente a 0°. Si elbOverrunCAMentrada está activa, entonces se realiza una verificación para asegurarse de que la leva de inercia esté configurada después deTDC1LowerLimity permanece fijado mientras la prensa está parada. La leva de inercia se puede restablecer sólo después de que se inicie el siguiente ciclo. Se permite un movimiento hacia atrás de la prensa sólo si elbUpwardCAMybOverrunCAMlas entradas sonFALSE. El movimiento de retroceso termina cuando elbOverrunCAMla entrada se convierteTRUE.Modo péndulo:
En el modo pendular se permiten ambos sentidos de giro. Dos puntos de inversión superiores (PMS: Punto muerto superior) se especifican aquí.
Debido a que la curva con la que se supone que debe ser accionada la prensa puede o debe modificarse para cada producto, el rango máximo de la carrera del péndulo se establece para los límites de ambos PMS.
Se realiza una verificación para asegurarse de que
TDC1yTDC2nunca se superan. Si esto sucede de todos modos, entonces elbCamMonOKla salida está configurada enFALSE. Al inicio del ciclo (flanco descendente en elbResetentrada), la prensa puede comenzar con cualquier movimiento (pulsante, inverso, etc.) hasta alcanzar el BDC. Después de eso sólo se permite el movimiento ascendente. El movimiento ascendente se emite como señal en elbUpwardsMoveproducción.El punto de inversión inferior (BDC: Punto muerto inferior) se especifica con un límite superior e inferior.
Se habilita un reinicio a través del
bResetaporte. Si la prensa se mueve hacia abajo sin que se detecte un borde descendente en elbResetentrada, entonces se detiene inmediatamente configurando elbCamMonOKsalida aFALSE.el opcional
bUpwardCAMybOverrunCAMLas entradas para conectar una leva ascendente y una leva de inercia no se admiten en el modo de péndulo. Si se activan por error, se genera un error.
FB_CAMMONITOR
El FB_CAMMONITOR proporciona al usuario un módulo de evaluación seguro que puede generar de forma segura las levas (bTDC, bBDC, y bUpwardsMove) según los valores fijos configurados y en función de la posición actual.
Salida del bloque de funciones: bUpwardsMove
La salida bUpwardsMove proporciona al usuario la información de que la prensa está en movimiento hacia arriba después de pasar el BDC. Esta señal se puede utilizar, por ejemplo, para silenciar cortinas fotoeléctricas o para transmitir comandos de control a la prensa.
Detección de posición de la prensa.
La detección de posición debe implementarse de acuerdo con el SIL requerido o el nivel de rendimiento. El usuario o fabricante de la máquina deberá acreditar que se ha cumplido esta condición.
El valor de posición debe verificarse de forma fiable, por ejemplo a partir de varios valores analógicos, o debe ponerse a disposición del bloque de funciones de otra forma segura. El primero se puede implementar, por ejemplo, mediante el COMPARE bloque de funciones. además, el bPressStarted La entrada se puede utilizar para generar una expectativa. En este caso, la demanda de un movimiento se comunica al bloque funcional. Luego, el bloque de función controla que también se produzca un cambio de posición dentro de los parámetros ajustados.
Modo excéntrico/modo péndulo
Para el modo excéntrico, el bExcentricMode La entrada está configurada y el TDC2UpperLimit y TDC2LowerLimit las entradas deben estar inactivas o 0.
El bPendulumMode La entrada está configurada para el modo péndulo y el TDC2UpperLimit y TDC2LowerLimit las entradas deben estar activas y no ser iguales a 0.
EL6900
El FB_CAMMONITOR El bloque de funciones no es compatible con el EL6900.
Nombre | Tipo de datos | Valor inicial | Descripción, valores de parámetros |
|---|---|---|---|
|
|
|
|
|
|
| Transferencia de parámetros en modo de configuración Si la entrada está configurada en |
|
|
| Posición de presión: el valor de posición debe verificarse de manera confiable, por ejemplo a partir de varios valores analógicos, o debe ponerse a disposición del bloque de funciones de otra manera segura de acuerdo con el SIL requerido o el nivel de rendimiento. Tipos de datos permitidos: |
|
|
| Entrada de reinicio: Se debe detectar un flanco descendente en el |
|
|
| Si la entrada está activa, entonces se espera un movimiento o cambio de posición para un 1 lógico en la entrada. Para hacer esto, el |
|
|
| Valor de posición máximo permitido durante un movimiento de 360° de la prensa. Sólo se permite un valor constante (sin variable). |
|
|
| Modo excéntrico: límite inferior del punto de inversión superior (PMS: Punto muerto superior). Este se encuentra a la izquierda del punto de inversión superior. Modo péndulo: Límite inferior del punto de inversión superior en la mitad izquierda de la prensa. El valor debe ser mayor que el punto de inversión inferior y menor que Tipos de datos permitidos: Se permiten valores constantes y variables. |
|
|
| Modo excéntrico: Límite superior del punto de inversión superior. Este se encuentra a la derecha del punto de inversión superior. Modo péndulo: Límite superior del punto de inversión superior en la mitad izquierda de la prensa. El valor debe ser mayor que TDC1LowerLimit y menor que udiMaxPosition. Tipos de datos permitidos: Se permiten valores constantes y variables. |
|
|
| Modo excéntrico: No utilizado Modo péndulo: Límite inferior del punto de inversión superior en la mitad derecha de la prensa. El valor debe ser mayor que Tipos de datos permitidos: Se permiten valores constantes y variables. |
|
|
| Modo excéntrico: No utilizado Modo péndulo: Límite superior del punto de inversión superior en la mitad derecha de la prensa. El valor debe ser mayor que 0 y menor que Tipos de datos permitidos: Se permiten valores constantes y variables. |
|
|
| . Límite inferior del punto de inversión inferior
Tipos de datos permitidos: Se permiten valores constantes y variables. |
|
|
| . Límite superior del punto de inversión superior
Tipos de datos permitidos: Se permiten valores constantes y variables. |
|
|
| Modo excéntrico: Modo péndulo: No utilizado Tipos de datos permitidos: Se permiten valores constantes y variables. |
|
|
| Modo excéntrico: Con esta entrada, la prensa se puede mover hacia atrás. Esto es posible hasta Modo péndulo: No utilizado |
|
|
| Modo excéntrico: Opcional. Aquí se puede conectar una leva de inercia. Se realiza una verificación para asegurarse de que la leva de inercia esté configurada después del PMS y permanezca configurada mientras la prensa está parada. La leva de inercia se puede restablecer sólo después de que se inicie el siguiente ciclo. Modo péndulo: No utilizado |
|
|
| Modo excéntrico: Opcional. Aquí se puede conectar una leva hacia arriba. Se realiza una verificación para asegurarse de que la leva esté configurada en BDC y reiniciada en 0°. Modo péndulo: No utilizado |
|
|
|
Sólo uno de los Sólo se permite un valor constante (sin variable) |
|
|
|
Sólo uno de los Sólo se permite un valor constante (sin variable) |
|
|
| Si el |
|
|
| Jitter permitido (en ms) para posición en reposo Sólo se permite un valor constante (sin variable) |
|
|
| Si el |
|
|
| Si el |
|
|
| Intervalo de tiempo (en ms) para la detección de parada en el que la posición sólo puede moverse según el valor Sólo se permite un valor constante (sin variable) |
Nombre | Tipo de datos | Valor inicial | Descripción, valores de parámetros |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
Después de iniciar el grupo donde está programado el bloque de funciones, |
|
|
| Operación excéntrica: Modo péndulo: Dependiendo de en qué mitad se inició el movimiento, la salida se establece en la otra mitad. La salida se establece desde |
|
|
| Operación excéntrica: diferencia entre Modo péndulo: No utilizado |
|
|
| Diferencia entre la posición en el flanco descendente en |
|
|
|
|