Ejemplo: uso del ControlLoopLibrary Biblioteca
Producto: Uso del ControlLoopLibrary Biblioteca
Los ejemplos muestran cómo usar los bloques de funciones del ControlLoopLibrary biblioteca para implementar componentes de ingeniería de control digital.
Descripción
El ControlElement Libraries Examples el paquete incluye cuatro proyectos:
FilterSampleTransferFunctionsSampleWaterLevelSampleWaterLevelSampleExtended
Proyecto: FilterSample
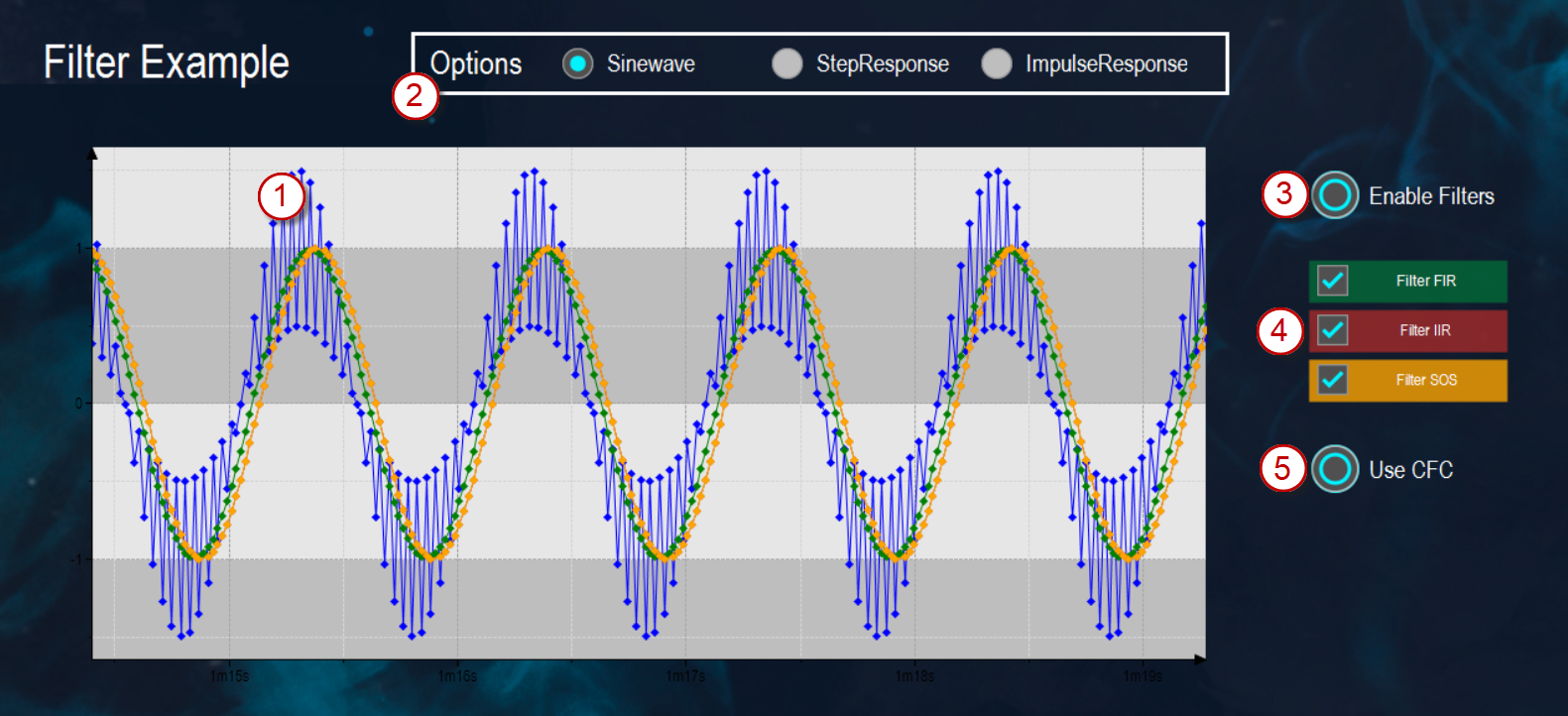
El FilterSample Un proyecto de ejemplo muestra cómo filtrar una señal ruidosa mediante el uso de los siguientes filtros de ingeniería de control:
FIR (respuesta de impulso finita)
IIR (respuesta de impulso infinita)
SOS (secciones de segundo orden)
Las implementaciones de muestra están disponibles en ST y CFC.
(1) |
| Forma de onda de señal azul: el programa simula una señal ruidosa para filtrarla. | |
(2) | Opciones | Onda sinusoidal | La señal ruidosa se configura como una onda sinusoidal utilizando el |
Respuesta escalonada | La señal ruidosa se configura por etapas mediante el | ||
Respuesta al impulso | La señal ruidosa se configura como un impulso utilizando el | ||
(3) | Activar filtros | Activa y desactiva los filtros aplicables. El filtrado se puede configurar independientemente de la selección actual. | |
(4) | Filtro FIR | Curva de señal verde: la señal se filtra a través del filtro FIR. | |
Filtro IIR | Curva de señal roja: la señal se filtra a través del filtro IIR. | ||
Filtro SOS | Curva de señal amarilla: la señal se filtra a través del filtro SOS. | ||
(5) | Usa CFC | Seleccione si el programa se ejecuta en segundo plano como ST o como CFC. | |
Proyecto: TransferFunctionsSample
El TransferFunctionsSample el proyecto incluye las siguientes aplicaciones:
Application_ControlLoopApplication_StepResponse
Solicitud: Application_ControlLoop
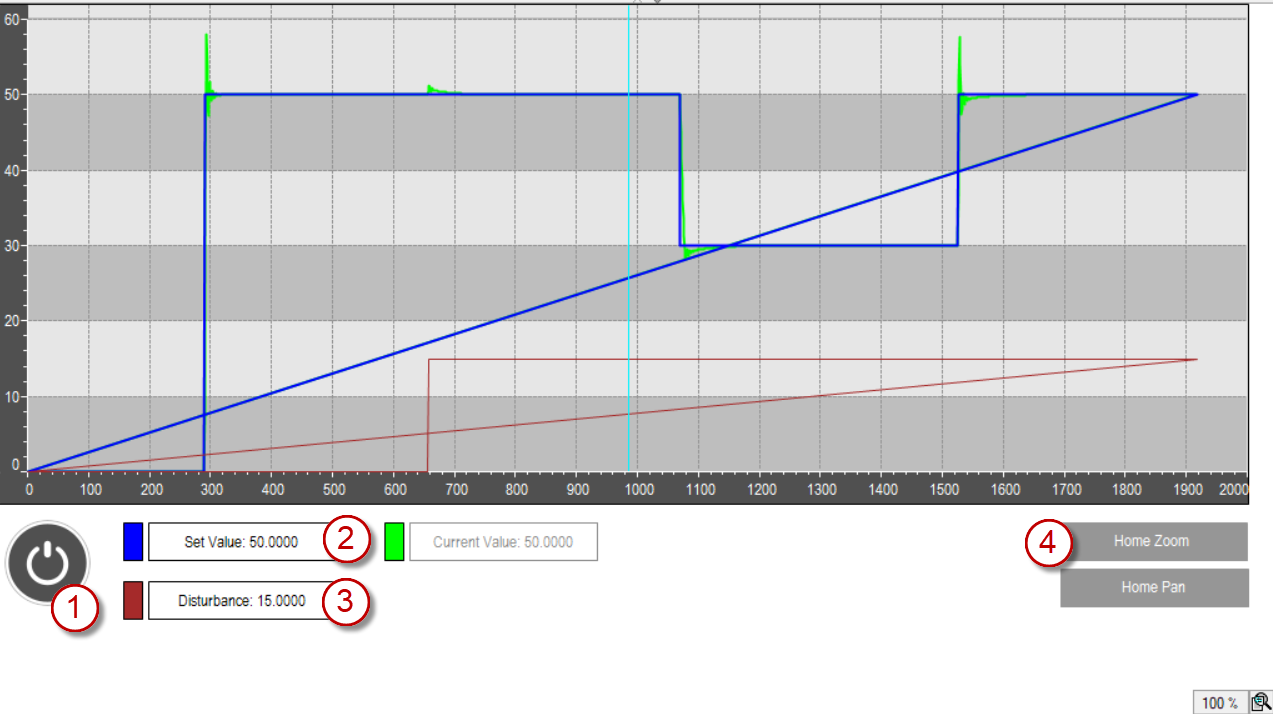
El Application_ControlLoop la aplicación representa un modelo de bucle de control. Un controlador PI sirve como unidad de control.
En el ejemplo, una función de transferencia PT1 representa un motor como el actuador del sistema controlado.
(1) |
| Inicia la simulación; otro clic restablece la simulación. |
(2) | Establecer valor | Especifica el valor objetivo |
(3) | Disturbio | Especifica la magnitud de la perturbación. |
(4) | Inicio > Zoom | Restablece la vista para ver toda la curva de datos del gráfico. |

Solicitud: Application_StepResponse
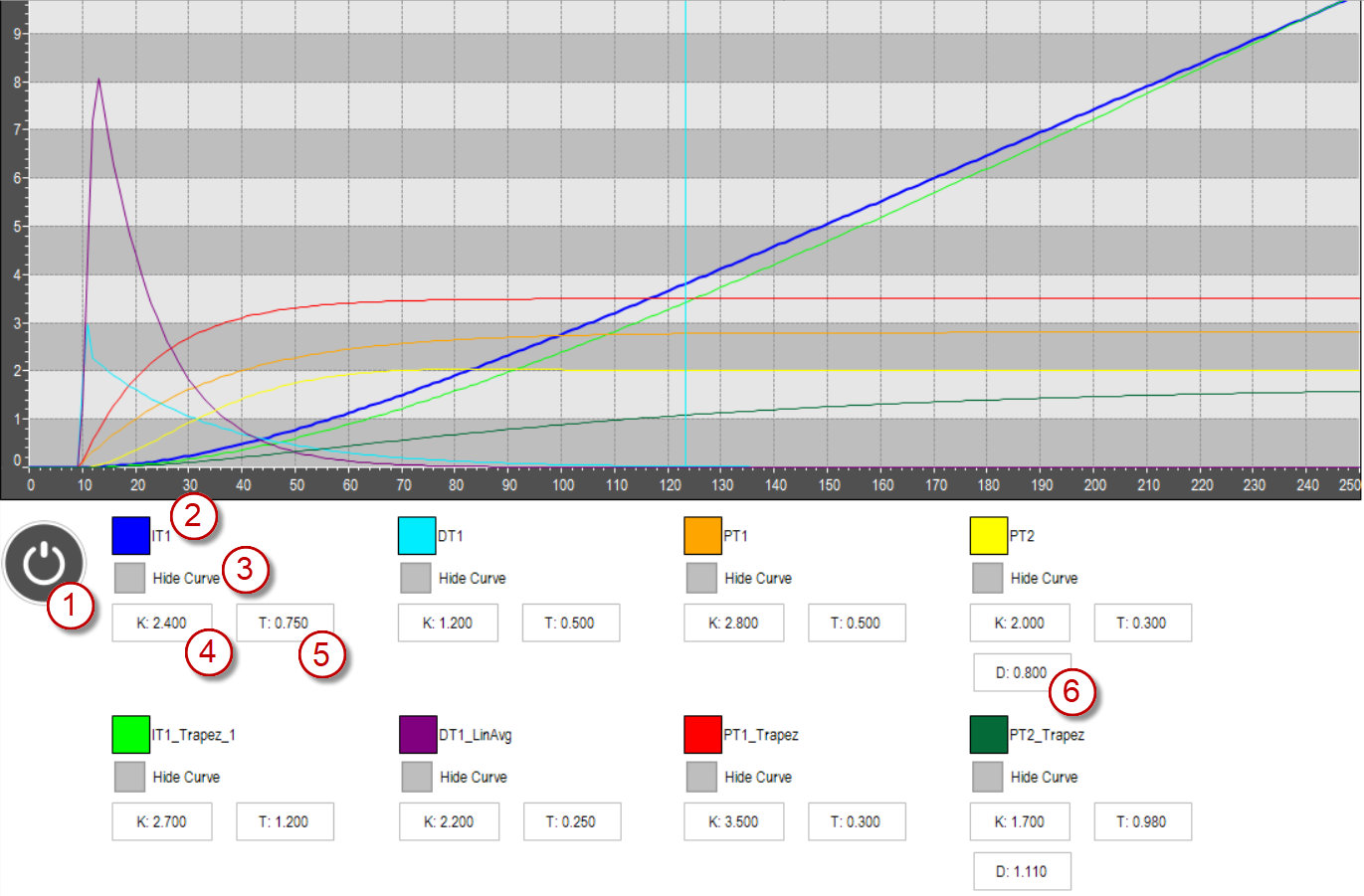
El Application_StepResponse La aplicación muestra el comportamiento de diferentes funciones de transferencia para parámetros específicos.
(1) |
| Inicia la simulación; otro clic restablece la simulación. |
(2) |  | El color respectivo de la curva de datos de una función de transferencia en el diagrama. |
(3) | Ocultar curva | Oculta o muestra la función de transferencia correspondiente. |
(4) | K | Ganancia de la respuesta escalonada |
(5) | T | Constante de tiempo de la respuesta escalonada |
(6) | D | Amortiguación de la respuesta escalonada |
Proyecto: WaterLevelSample
El WaterLevelSample El ejemplo muestra un tanque de agua cuyo nivel de llenado debe mantenerse constante mediante varias estrategias de control. El agua sale continuamente a través de una válvula en el fondo del tanque. El regulador controla el flujo de agua hacia el tanque para contrarrestar el flujo de salida
En concreto, se utiliza un control PID y varias versiones de un controlador de dos puntos.
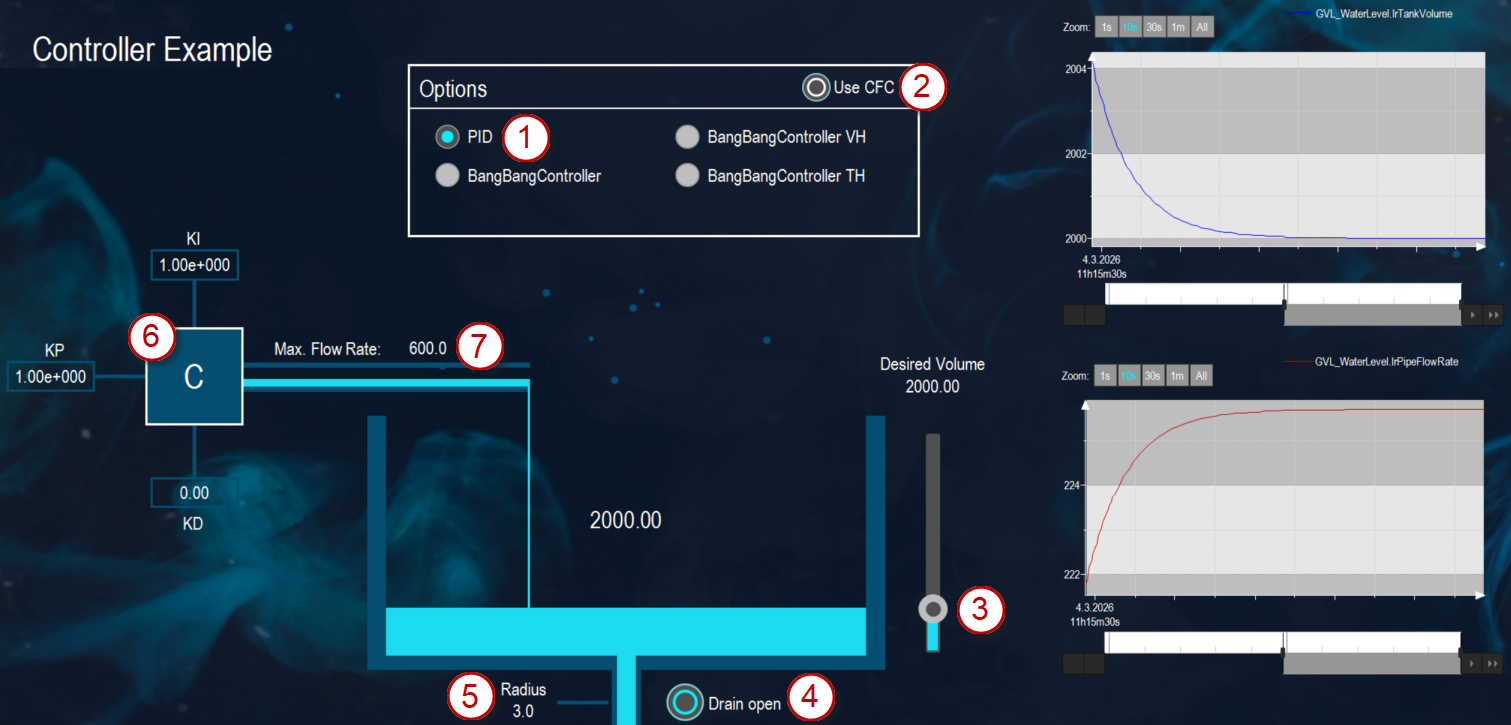
(1) | Opciones | PID | Se utiliza un control PID para regular el valor establecido. |
Controlador Bang Bang Controlador BangBang VH Controlador BangBang TH | Se utiliza un control bang-bang para regular el valor establecido. | ||
(2) | Usa CFC | Seleccione si el programa se ejecuta en segundo plano como ST o como CFC. | |
(3) | Volumen deseado | El deslizador situado junto al depósito de agua configura el nivel de llenado objetivo deseado. | |
(4) | Desagüe abierto | Abre y cierra la válvula de desagüe | |
(5) | Radio | Cambia el radio de la tubería de desagüe | |
(6) | KI KP KD | Establezca los parámetros para el control PID. | |
(7) | Máximo. Velocidad de flujo | Establece el caudal máximo de la tubería de entrada de agua. | |
Proyecto: WaterLevelSampleExtended
El WaterLevelSampleExtended el proyecto se basa en WaterLevelSample ejemplo.
También muestra cómo usar un controlador de tres puntos.
Requisitos y restricciones del sistema
Sistema de programación | Sistema de desarrollo CODESYS versión 3.5.18.50 o superior |
Sistema de ejecución | CODESYS Control Win versión 3.5.18.50 o superior Nota: Utilice el gratuito Lector de dispositivos aplicación (disponible en CODESYS Store International) para conocer las funciones compatibles con el controlador. |
Componentes adicionales | - |
Requerimientos adicionales | - |