Pestaña: EtherCAT Maestro General
La pestaña se utiliza para configurar los ajustes básicos del EtherCAT Maestro. Los ajustes básicos están preestablecidos en el archivo de descripción del dispositivo.
Configuración de los parámetros de configuración
Importante
El modo de configuración automática (Configuración automática maestro/esclavos La opción "Modo de configuración automática" está seleccionada por defecto y es adecuada para aplicaciones estándar. Si no se selecciona este modo, todos los ajustes de configuración del maestro y los esclavo deben realizarse manualmente. Se requieren conocimientos técnicos para ello. La opción "Modo de configuración automática" debe estar desactivada para configurar la comunicación entre esclavos.
Configuración automática maestro/esclavos |
Incluso si se selecciona esta opción del maestro, se puede habilitar explícitamente un modo experto para cada esclavo individual, lo que permite la edición manual de la configuración de datos de proceso generada automáticamente. |

Dirección de destino (MAC) | Dirección MAC del dispositivo en el EtherCAT red que debe recibir los telegramas. . Opciones
|
Dirección de origen (MAC) | Dirección MAC del controlador (sistema de destino) o nombre de red (nombre del adaptador o PLC (sistema de destino)) |
Nombre de red | Nombre o MAC de la red, dependiendo de cuál de las siguientes opciones esté seleccionada: |
Seleccionar la red por MAC |
|
Seleccionar la red por su nombre |
|
Escanear | Escanea la red en busca de los ID MAC o los nombres de los dispositivos de destino que están actualmente disponibles. |
Estas configuraciones se muestran únicamente cuando el Redundancia Se selecciona la opción. Aquí se definen los parámetros del dispositivo adicional según la descripción de Configuración EtherCAT NIC. |
Tiempo de ciclo (µs) | Intervalo de tiempo tras el cual se envía un nuevo telegrama de datos en el bus. Cuando el Reloj distribuido Cuando la función está habilitada en el esclavo, el tiempo de ciclo maestro especificado aquí se transfiere a los relojes esclavo . Como resultado, se logra una sincronización precisa del intercambio de datos. Esto es especialmente importante cuando los procesos distribuidos espacialmente requieren acciones simultáneas. Un ejemplo de acción simultánea son las aplicaciones en las que varios ejes deben ejecutar movimientos coordinados simultáneamente. De esta manera, se logra una base de tiempo muy precisa para toda la red, con un jitter considerablemente inferior a 1 microsegundo. |
Desplazamiento Sync | Parámetro para configurar el tiempo de retardo entre la base de tiempo de DC del EtherCAT Esclavo e inicio del ciclo del PLC. El valor predeterminado es 20 %. Este tiempo se activa simultáneamente para todos los esclavos con DC. Un desfase del 20 % significa que la interrupción del temporizador... EtherCAT La Esclavo tiene lugar un 20% antes del siguiente ciclo IEC. Esto significa que en el caso de
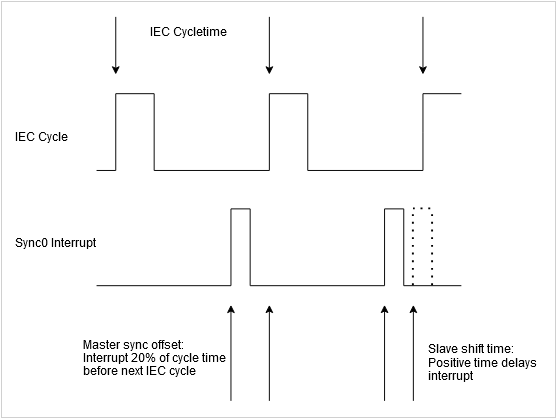 Si la DC está activa en el esclavo correspondiente, la configuración predeterminada proviene del archivo ESI correspondiente. El fabricante del dispositivo puede definir compensaciones adicionales aquí en forma de Tiempo de desplazamiento para ambos Sync 0 y Sync 1 interrupciones del temporizador. Cuando la configuración experta está habilitada en el esclavo, estos tiempos se pueden cambiar manualmente. Tiempo de desplazamiento se inscribe en el registro ImportanteSe debe evitar a toda costa que la interrupción de sincronización se produzca cerca del ciclo IEC, ya que, de lo contrario, no se pueden almacenar datos durante un ciclo y los dispositivos entran en un error de sincronización. Para ello, se deben considerar tanto los desplazamientos del maestro como los desplazamientos individuales de cada esclavo . Con la configuración normal de 20% de desplazamiento para el maestro y 0% para los esclavos, la fluctuación del ciclo IEC y los retrasos en el tiempo de transmisión por parte del sistema pueden ser de un máximo de +80% y –20%. |
Supervisión ventana Sync |
|
Ventana Sync | Es hora de Supervisión ventana Sync. Cuando la sincronización de todos los esclavos está dentro de esta ventana de tiempo, la variable |
Usa LRW en lugar de LWR/LRD |
|
Mensajes por tarea |
|
Auto restart slaves |
|
Esta funcionalidad permite la comunicación desde una herramienta de configuración de dispositivo externo a través de la puerta de enlace del buzón de correo al EtherCAT dispositivos. No es necesario cambiar el cableado. En general, se pueden utilizar todos los protocolos de buzón especificados (CoE, FoE, VoE, SoE). | |
Activar |
|
Dirección IP | Dirección IP de la conexión UDP. El puerto UDP está configurado en 0x88a4. Opciones
|
Estas configuraciones solo se pueden editar cuando el Configuración automática maestro/esclavos La opción está desactivada. De lo contrario, se realiza automáticamente y no se muestran aquí. | |
Dirección de entrada de imagen | Primera dirección lógica del primer esclavo para datos de entrada |
Dirección de salida de imagen | Primera dirección lógica del primer esclavo para datos de salida |