Configuración de servomotor
Requisito: una placa PWM de 16 canales/12 bits de Adafruit está conectada a través de I²C y un servo modelo está conectado a su primer canal PWM.
El SoftMotion Servo Example.project proyecto contiene una aplicación donde CODESYS SoftMotion se utiliza junto con los servomotores modelo. Una placa de expansión (Adafruit ID 815) conectada a través de I²C se utiliza como interfaz de comunicación.
Abre el
SoftMotion Servo Example.projectproyecto y actualizarlo.En el árbol de dispositivos, haga doble clic Dispositivo.
Se abre el editor de dispositivos.
En Configuración de comunicación, haga clic Escanear red.
Si su Raspberry Pi y el sistema de desarrollo están en la misma red, su Raspberry Pi se muestra para su selección.
Selecciónalo y haz clic .
La aplicación se descarga en su Raspberry Pi.
Inicie el programa (pulse la tecla F5 llave).
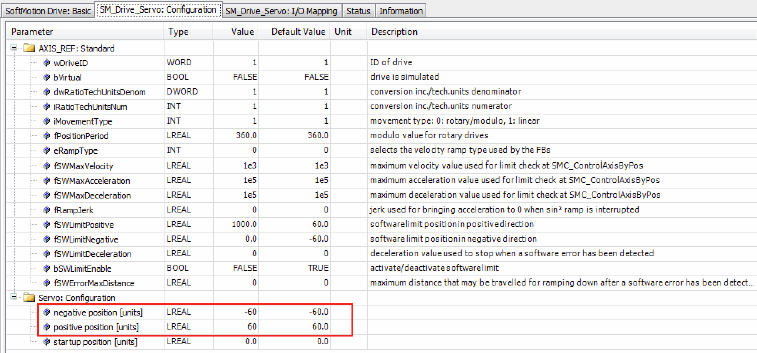
El servomotor comienza a girar constantemente de izquierda a derecha. El
PLC_PRGEl programa implementado en SFC es responsable de esto. Enciende el eje y luego lo mueve entre las posiciones -60 y +60 especificadas como posiciones finales en elSM_Drive_Servoconfiguración de ejes.El preset de posición se transporta a través de la interfaz PWM, como es habitual en los servos de modelado. Se transmite un pulso ALTO, que tiene una duración de entre 1 y 2 ms, con una frecuencia fija (predeterminada: 50 Hz; parámetro del dispositivo Adafruit PWM SoftMotion). 1 ms representa la posición final inferior y 2 ms la posición final superior. El rango de movimiento varía de un tipo de motor a otro. Si el motor se controla en grados angulares, debe medir el rango de movimiento. Para ello, conduzca hasta las posiciones finales (en el ejemplo -60, +60) e introduzca las posiciones medidas en la pantalla de configuración:
Abra cualquier navegador (posiblemente en un teléfono inteligente) y especifique la dirección
<network address>:8080/webvisu.htm.La visualización se abre y muestra la posición especificada generada. Puedes controlar la velocidad.