Kin_Polar (FB)¶
- FUNCTION_BLOCK Kin_Polar IMPLEMENTS ISMPositionKinematicsInternal,
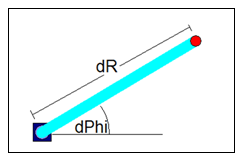
Transformation FB for polar kinematics.
A Polar Systems consists of one distance and one direction axis.
Machine coordinate system (MCS) |
|
|---|---|
Origin |
Location of the TCP when the position value of the linear axis (a1) is 0. |
X |
The X axis is defined so that a positive velocity of the linear axis (a1) while the rotary axis (a0) is at 0° leads to a movement purely along the X axis in positive direction. |
Y |
The Y axis is defined so that a positive velocity of the linear axis (a1) while the rotary axis (a0) is at 90° leads to a movement purely along the Y axis in positive direction. |
Relative to the machine coordinate system, the tool coordinate system is shifted and rotated around the Z axis by the current position of axis a0.
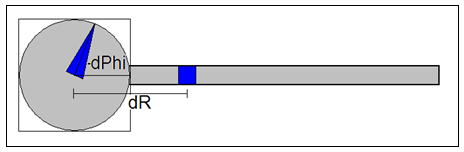
The single axes values have the following interpretation:
a0 |
position of the rotary axis around Z in degrees. referred to as ‘C’ in the section ‘mapping to axes’ . |
a1 |
position of the linear axis in the direction of X axis (>= 0). referred to as ‘R’ in the section ‘mapping to axes’. |
Note
This position kinematics does not support orientation mode “Axis” for CP movements.
If this kinematics is used without an orientation-kinematics, then it is not compatible with tools (see SMC_GroupSetTool) that have a position offset in a direction other than the Z direction.
- Attributes:
sm_kin_libdoc
Properties:
Methods:
Structure: