MC_TRANSITION_MODE (ENUM)¶
TYPE MC_TRANSITION_MODE :
The transition mode describes how consecutive motion commands are blended.
- Attributes:
qualified_only- InOut:
Name
Comment
TMNone
No blending.
TMStartVelocity
Velocity based blending.
The blending points, A’ and B’ are chosen so that blending can be done without decelerating, based on a heuristic.
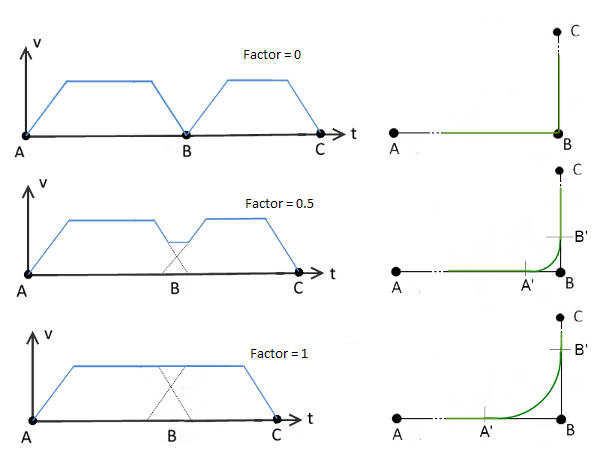
For estimating A’ and B’, the commanded dynamic limits are used, the override and the ancillary axis limits are not considered. The goal is that the override and the ancillary limits don’t influence the path in space.
TransitionParameter[0] is a factor that influences the blending points A’ and B’. A factor of 1 (100%) means that blending is started when the deceleration phase would begin on the unmodified first movement, and finished when the acceleration phase would end on the unmodified second movement. Larger factors lead to a larger blending area, smaller factors lead to a smaller blending area.
The value of TransitionParameter[2] determines which axes are considered for the velocity. See SMC_StartVelocityAxes.
Note on aborting: the factor is taken into account, too, but depending on the aborting movement, a factor of 1 does not necessarily mean that constant velocity can be kept.
It is recommended to use the function block SMC_StartVelocity to set the transition mode and transition parameters of movement function blocks.
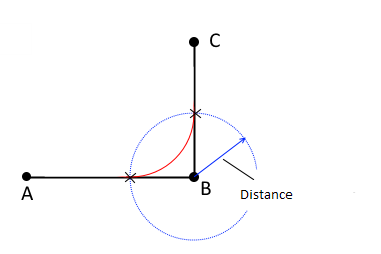
TMCornerDistance
Distance based blending.
The value of TransitionParameter[0] specifies the distance between the corner (i.e. the end of the first movement) and the cut points where the blending starts and ends.
Note
In case of tracking between different coordinate systems and tracking with PTP movements, the corner distance is evaluated when the axis group plans the trajectory on the blended path. This means that, when the axis group travels the blending, the distance may be slightly different, depending on the movement of the tracked coordinate systems.
It is recommended to use the function block SMC_CornerDistance to set the transition mode and transition parameters of movement function blocks.
TMAxisDistance
Axis distance based blending.
This transition mode blends movements in axis space where the blending point is determined by giving a distance of the axes to the end point of the first movement / start point of the second movement.
The distance is specified by two values: A linear distance (TransitionParameter[0]) for linear axes plus a rotary distance (TransitionParameter[1]) for rotary axes. The linear distance has the units of the linear axes (e.g. mm), the rotary distance has the unit angular degrees.
The value of TransitionParameter[2] determines which axes are considered for the axis distance. See SMC_AxisDistanceAxes.
The value of TransitionParameter[3] determines how the distances are interpreted. See SMC_AxisDistanceSubMode.
It is recommended to use the function block SMC_AxisDistanceTransition or the function SMC_AxisDistanceTransitionParam to set the transition mode and/or transition parameters of movement function blocks.